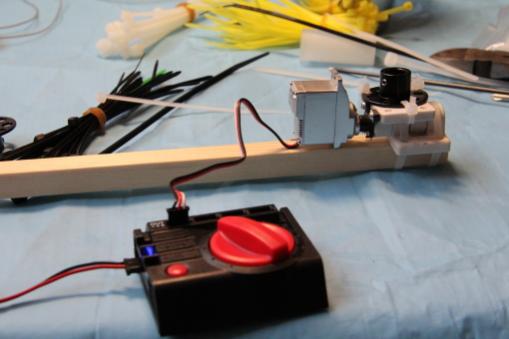
Ik heb een tricoper gebouwd (ver 2.5 from rcexplorer.se), een leuk model. Voor stabilisatie gebruik ik het HobbyKing Quadcopter Control Board V2.1 (Atmega168PA) waarop tricopter firmware gezet heb. (ver 2.5 tricopter - www.http://www.lazyzero.de/).
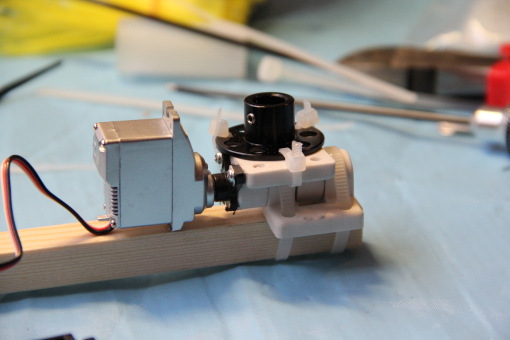
Heel de bouw en de setup gingen zeer vlot, maar er blijkt een belangrijke vibratie in de servo te zitter. Hoe kan ik dit oplossen?
Heel de bouw en de setup gingen zeer vlot, maar er blijkt een belangrijke vibratie in de servo te zitter. Hoe kan ik dit oplossen?