Regelmatig krijg ik de vraag welke instellingen ik gebruik op mijn Graupner MX-16 HoTT i.c.m. de DJI Naza-M flightcontroller.
Hoewel er al wat handleidingen circuleren leek het me wel nuttig om dit nog eens uitvoerig te bespreken aan de hand van begeleidende foto's.
Alle functies van de Naza worden benut en deze handleiding toont werkende settings.
De vluchtmodi zitten bij mij op de 3-standen schakelaar CTRL 9 (schakelaar van je af = MAN, in het midden = ATT, naar je toe = GPS) en de handmatige fail-safe zit op de 2-standen schakelaar SW8 (schakelaar van je af is uit, naar je toe is aan):

Overigens maak ik gebruik van de verschillende locking opties (course lock en home lock) en die zitten bij mij op de 3-standen schakelaar CTRL 10 (van je af = uit, in het midden = course lock, naar je toe = home lock:

Omdat ik een gimbal heb stuur ik de tilt daarvan aan met de draaiknop CTRL 7:

Overigens is het ook mogelijk om in plaats van de gimbal (als je die bijv. niet hebt of niet de behoefte hebt om tijdens de vlucht de tilt aan te passen) die draaiknop te gebruiken om gains van de Naza tijdens de vlucht aan te passen. Zeer handig!
Je kunt dit alles als volgt instellen:
Zet je MX-16 aan en maak eventueel een nieuw acro, ook wel vliegtuig, model aan en bind je ontvanger.
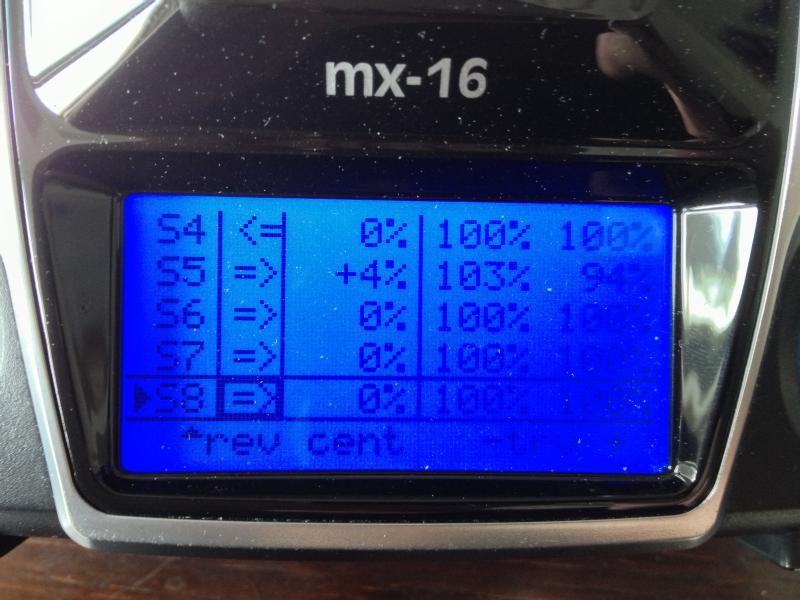
Ga naar het menu door op SET te drukken en ga naar "servo set.".
Vul daar deze waarden in, het gaat om het kanaal S5 wat gebruikt wordt voor de vluchtmodi en kanaal S7 dat gebruikt wordt voor de locking opties:

Ga dan terug naar het menu door op ESC te klikken.
Ga dan naar "contr set." en vul daar de volgende waarden in:

Je kunt de schakelaars instellen door op "free" te klikken en dan de schakelaar te bewegen die je in dient te stellen.
CTRL 9 = vluchtmodi
CTRL 7 = draaiknop voor gimbal/gains
CTRL 10 = locking opties
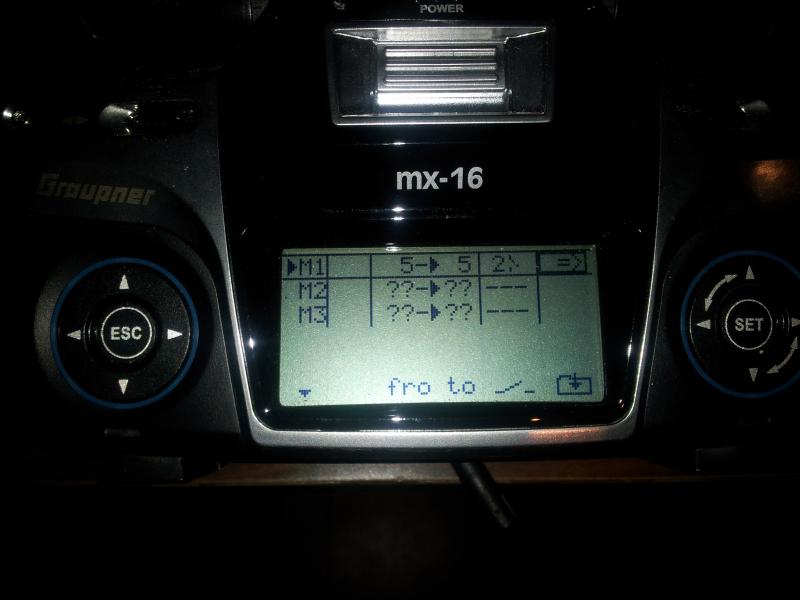
Klik weer op ESC en ga vervolgens naar "free mixer".
Zet de schakelaar voor de handmatige fail-safe van je af voordat je "---" selecteert om de schakelaar te aan te stellen.
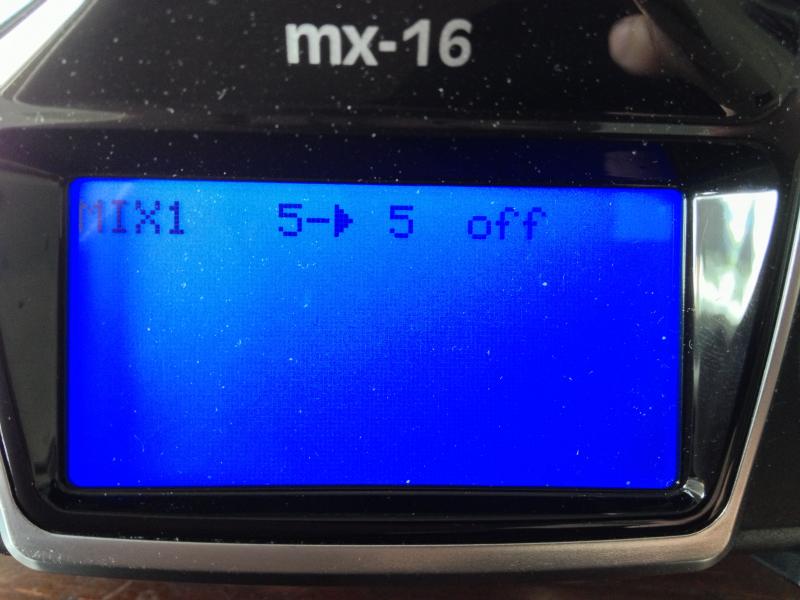
Zo zou het er uit moeten zien wanneer de fail-safe schakelaar van je af staat.

Wanneer je nu "=>" selecteert zou je dit moeten zien:
Schakel nu de schakelaar om door deze naar je toe te schakelen.
Je zou dan meer moeten zien, zoals het raamwerk voor een grafiek.
Vul daar de volgende gegevens voor in:
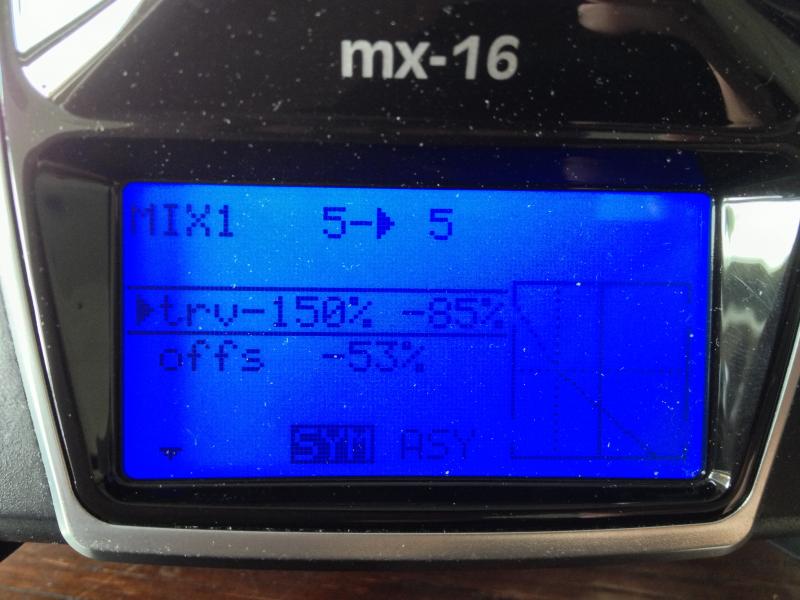
Voor "trv" moet je ASY gebruiken (asymetrisch) en dus niet SYM.
Voor "offs" dien je SEL te gebruiken.
Ga weer terug naar het menu door op ESC te klikken en ga vervolgens naar failsafe. Schakel de fail-safe schakelaar eerst naar je toe en stel dan pas voor kanaal 5 "Pos" in in plaats van "Hold":
LET OP: Ik moet zelf nog even uitzoeken hoe de fail-safe precies werkt op andere kanalen. Dit kan dus nog veranderen.

Als je nu je multicopter aansluit op de computer en de assistant opent dan kun je alles uitvoerig testen en uitproberen.
Zie ook het filmpje dat ik net hiervoor heb gemaakt:
Bij mij werkt het super zo maar je zou wellicht wat moeten spelen met de waarden.
Succes!
Hoewel er al wat handleidingen circuleren leek het me wel nuttig om dit nog eens uitvoerig te bespreken aan de hand van begeleidende foto's.
Alle functies van de Naza worden benut en deze handleiding toont werkende settings.
De vluchtmodi zitten bij mij op de 3-standen schakelaar CTRL 9 (schakelaar van je af = MAN, in het midden = ATT, naar je toe = GPS) en de handmatige fail-safe zit op de 2-standen schakelaar SW8 (schakelaar van je af is uit, naar je toe is aan):
Overigens maak ik gebruik van de verschillende locking opties (course lock en home lock) en die zitten bij mij op de 3-standen schakelaar CTRL 10 (van je af = uit, in het midden = course lock, naar je toe = home lock:
Omdat ik een gimbal heb stuur ik de tilt daarvan aan met de draaiknop CTRL 7:
Overigens is het ook mogelijk om in plaats van de gimbal (als je die bijv. niet hebt of niet de behoefte hebt om tijdens de vlucht de tilt aan te passen) die draaiknop te gebruiken om gains van de Naza tijdens de vlucht aan te passen. Zeer handig!
Je kunt dit alles als volgt instellen:
Zet je MX-16 aan en maak eventueel een nieuw acro, ook wel vliegtuig, model aan en bind je ontvanger.
Ga naar het menu door op SET te drukken en ga naar "servo set.".
Vul daar deze waarden in, het gaat om het kanaal S5 wat gebruikt wordt voor de vluchtmodi en kanaal S7 dat gebruikt wordt voor de locking opties:
Ga dan terug naar het menu door op ESC te klikken.
Ga dan naar "contr set." en vul daar de volgende waarden in:
Je kunt de schakelaars instellen door op "free" te klikken en dan de schakelaar te bewegen die je in dient te stellen.
CTRL 9 = vluchtmodi
CTRL 7 = draaiknop voor gimbal/gains
CTRL 10 = locking opties
Klik weer op ESC en ga vervolgens naar "free mixer".
Zet de schakelaar voor de handmatige fail-safe van je af voordat je "---" selecteert om de schakelaar te aan te stellen.
Zo zou het er uit moeten zien wanneer de fail-safe schakelaar van je af staat.
Wanneer je nu "=>" selecteert zou je dit moeten zien:
Schakel nu de schakelaar om door deze naar je toe te schakelen.
Je zou dan meer moeten zien, zoals het raamwerk voor een grafiek.
Vul daar de volgende gegevens voor in:
Voor "trv" moet je ASY gebruiken (asymetrisch) en dus niet SYM.
Voor "offs" dien je SEL te gebruiken.
Ga weer terug naar het menu door op ESC te klikken en ga vervolgens naar failsafe. Schakel de fail-safe schakelaar eerst naar je toe en stel dan pas voor kanaal 5 "Pos" in in plaats van "Hold":
LET OP: Ik moet zelf nog even uitzoeken hoe de fail-safe precies werkt op andere kanalen. Dit kan dus nog veranderen.
Als je nu je multicopter aansluit op de computer en de assistant opent dan kun je alles uitvoerig testen en uitproberen.
Zie ook het filmpje dat ik net hiervoor heb gemaakt:
Bij mij werkt het super zo maar je zou wellicht wat moeten spelen met de waarden.
Succes!
Laatst bewerkt door een moderator:




") .
.")


