markjuhh
Forum veteraan
Hey
Bij deze een simpel bouwverslagje van de FP FQ05.
Dit is een mini quadcopter gebaseert op de TBS Discovery.
Frameplaten worden met de hand gemaakt van 1,5mm G10.
Met dit frame ben ik 3e geworden op de 1e BNL multicopterraces")
Wil je ook een FQ05, stuur mij een PBtje.

De onderdelen:
We beginnen met de framekit.
Alle benodigde schroeven worden meegeleverd:

Als aansturing gebruik ik in dit geval de Naze32 Acro:
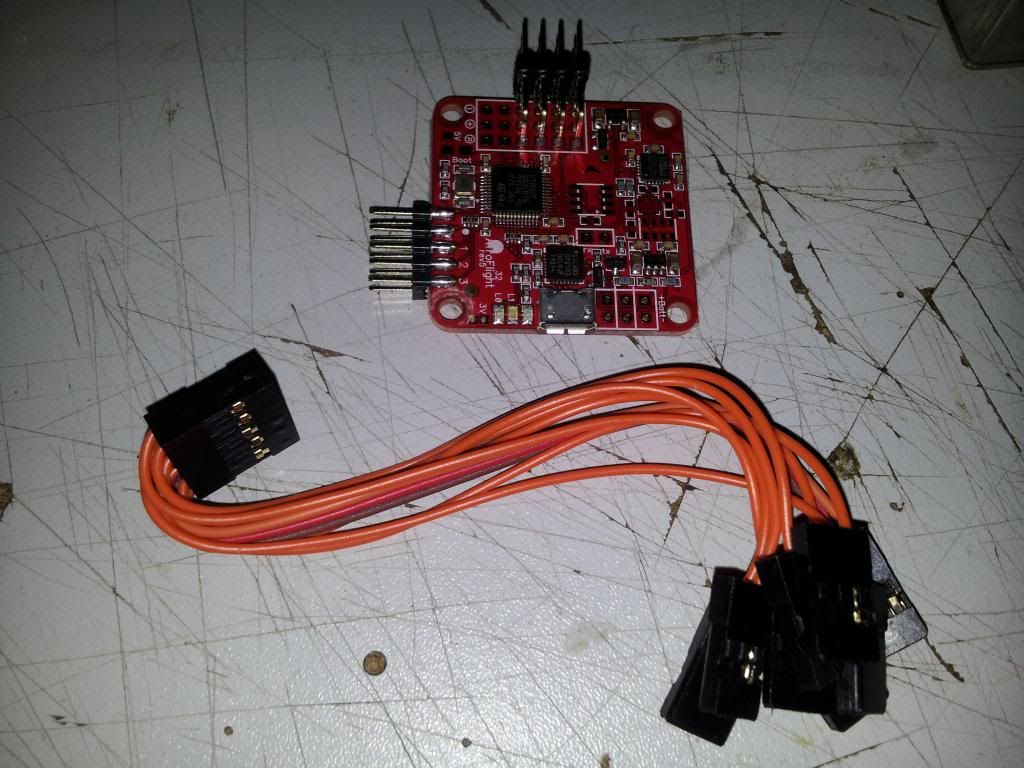
Om het geheel van stroom te voorzien heb je 11cm rode en zwarte 16AWG kabel nodig:

En een stapel regelaars en motoren,
In dit geval gebruik ik:
- Emaxx 2805 2840kv motoren,
-Afro 12A Regelaars

De armen kan je meebestellen met het frame of zelf maken van 10x10mm alu profiel.
Voor een FQ05 krijg je armen van 10,5 cm, (5" props)
Voor een FQ06 krijg je armen van 12,7 cm. (6" props)
(het enige verschil tussen de FQ05 en de FQ06 is de lengte van de armen)
De gaten om de armen aan het frame te bevestigen komen op 1cm van het uiteinde.
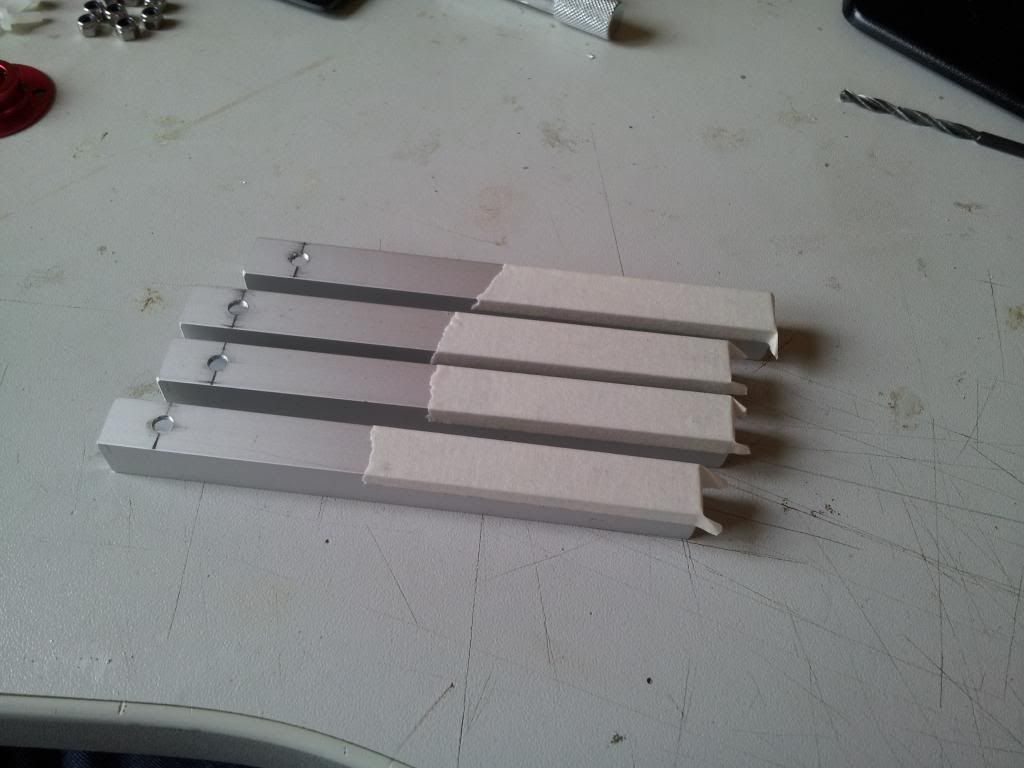
Om de gaten voor de motorbevestiging netjes af te tekenen plak ik eerst wat schilderstape op de armen:
Daarna markeer je de gaten:

En begin je met boren:
Ik begin altijd met 1mm, vervolgens 3mm, en daarna 4mm.

En als dat goed gaat komt het er zo uit te zien en zijn ze klaar voor gebruik:

Bij deze bouw ga ik nog geen FPV spul inbouwen omdat de volgende eigenaar dat zelf wil doen.
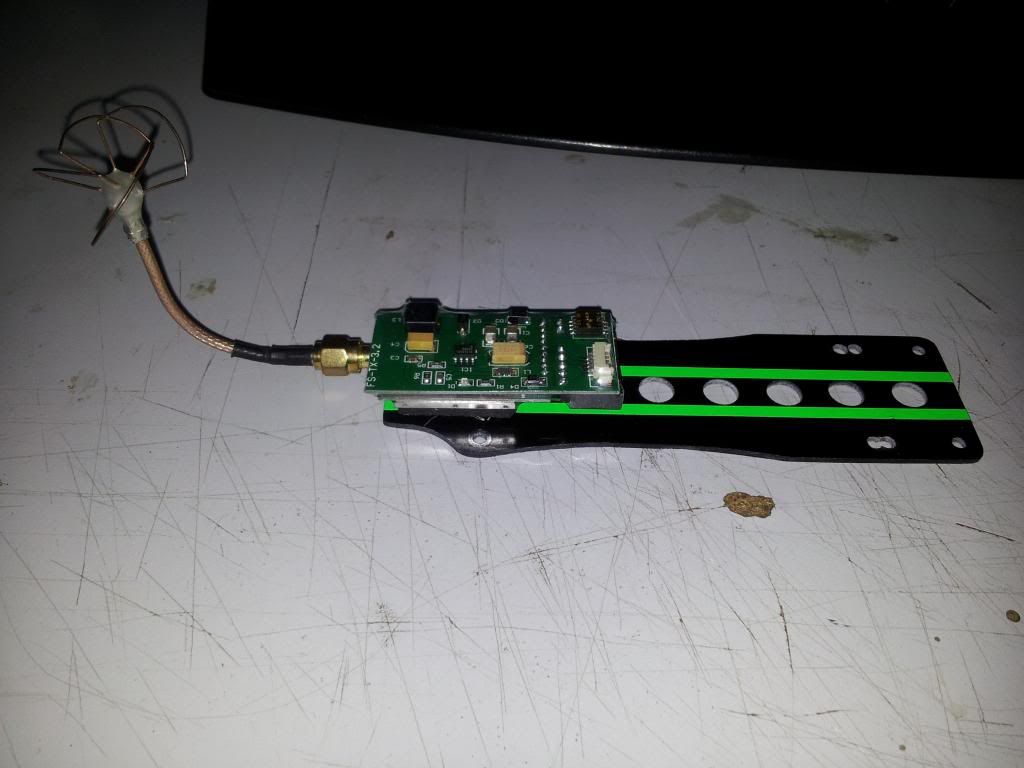
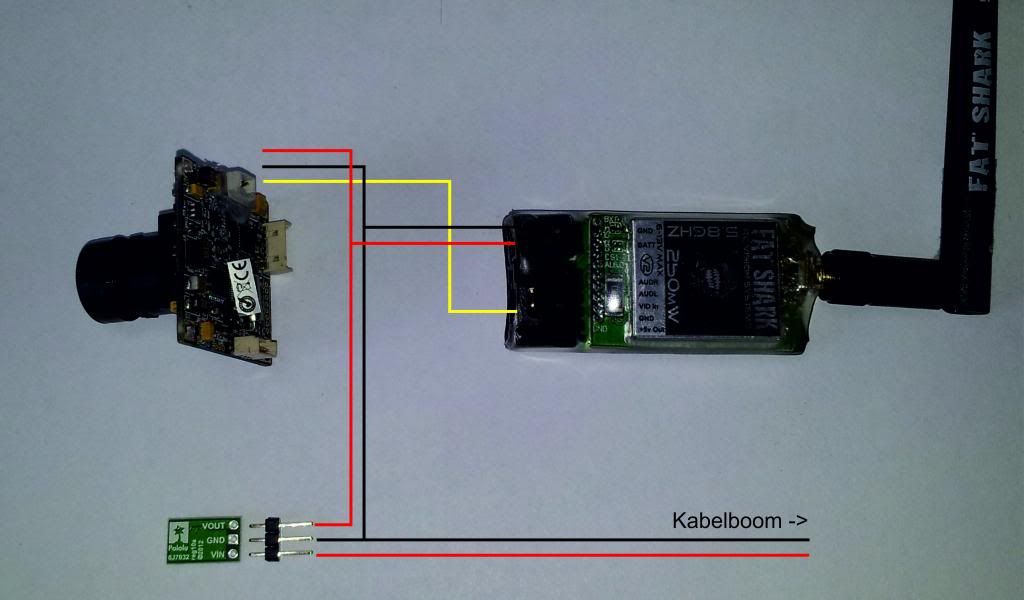
Wel houd ik alvast rekening met de stroomtoevoer naar het FPV gebeuren.
Inbouw van FPV spullen zal ik later bijvoegen aan de hand van mn eigen frame.
----------------------------------------------------------------------
De Bouw
We hebben nu dus alles wat we nodig hebben dus kan er begonnen worden aan het bouwen.
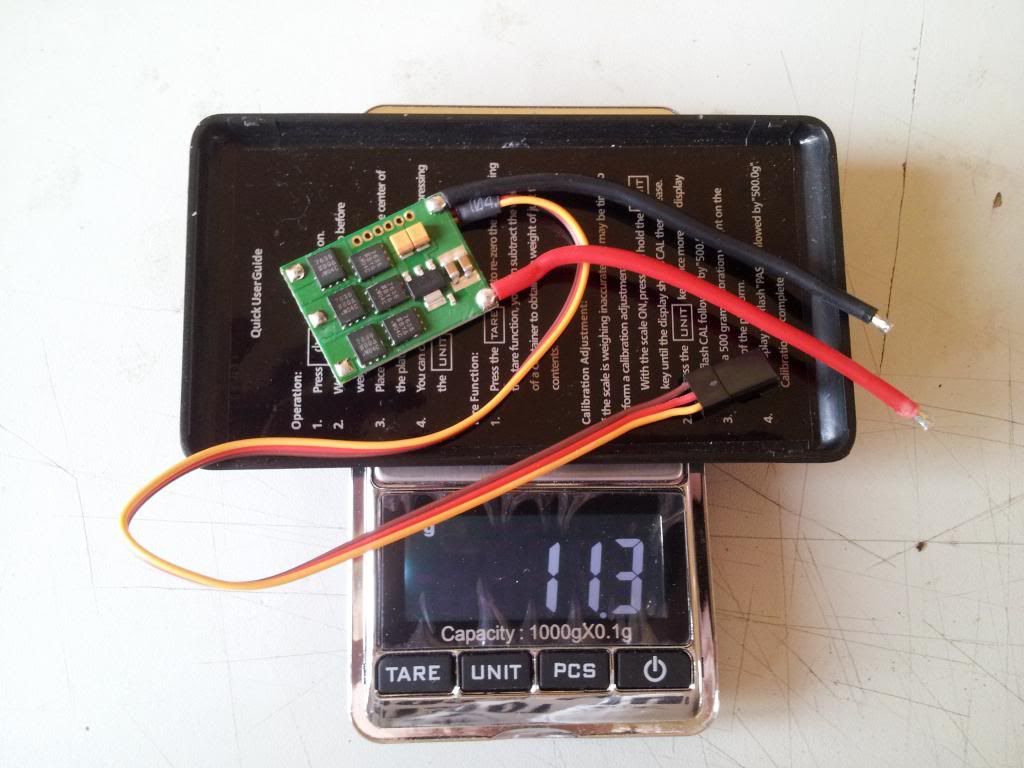
Als eerste ga ik de regelaars op dieet zetten.
Dit wegen ze rechtstreeks uit de verpakking:

Aangezien de regelaars op de armen dichtbij de motoren komen te zitten zijn de draden richting de motor alleen maar overbodig gewicht dus die gaan er vanaf.
Ook de stekkers aan de accukant gaan eraf omdat ze aan de kabelboom gesoldeerd gaan worden.
De drie aderige kabel voor de aansturing kort ik nu nog niet in, dat doe ik later zodat ik ze meteen netjes op maat kan knippen.
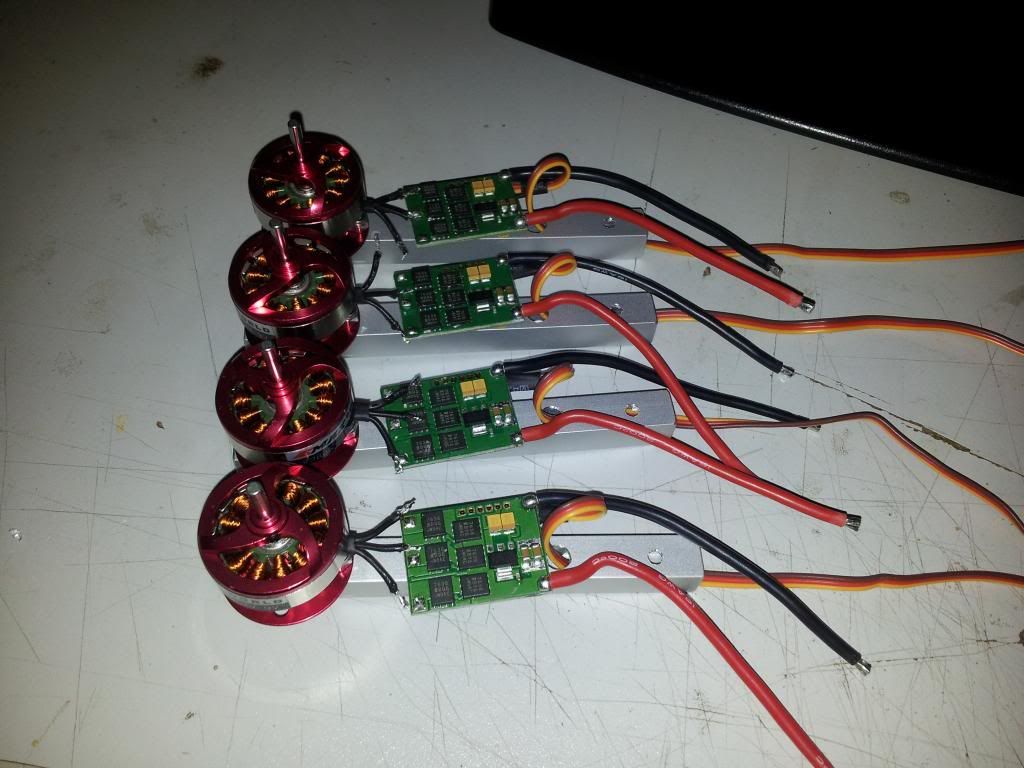
Als ze alle 4 gedaan zijn houd je zoiets over:

Dan zijn de motoren aan de beurt.
Ook daar zit te lange draad aan die ik ingekort heb.
Nadeel van motordraden inkorten is dat het gaat om lak draden. Als je deze wil solderen hecht de soldeer alleen op het uiteinde waar geknipt is en dat is niet sterk genoeg.
Om te zorgen dat er een sterke verbinding komt zal je een deel van de lak moeten verwijderen. Dit gaat best handig met wat aspirine of paracetamol en een dikke soldeerbout.
Zelf krab ik zoveel mogelijk van de lak weg voor ik ze tussen de soldeerbout en de aspirine duw zodat ik zo kort mogelijk de aspirine hoef te verwarmen.
(lucht die er af komt is niet echt gezond volgens mij)

Als dat gedaan is zul je zien dat de tin wil blijven plakken aan de eindjes en dan zijn ze klaar om aan de regelaars gezet te worden:
Maar voordat ik dat ga doen maak ik eerst de kabelboom.
Als eerste heb ik de zwarte stekkers van de 3aderige kabel gehaald zodat de draad door de armen gevoerd kan worden.
Ik leg een klein lusje in de kabel als trekontlasting. Mocht je nu bij een crash ergens achter blijven hangen met een regelaar word niet je aanstuur kabel doorgesneden door de armen.
Vervolgens de regelaars aan de kabelboom gesoldeerd en alvast draad aangelegd om de FPV set-up te voeden:
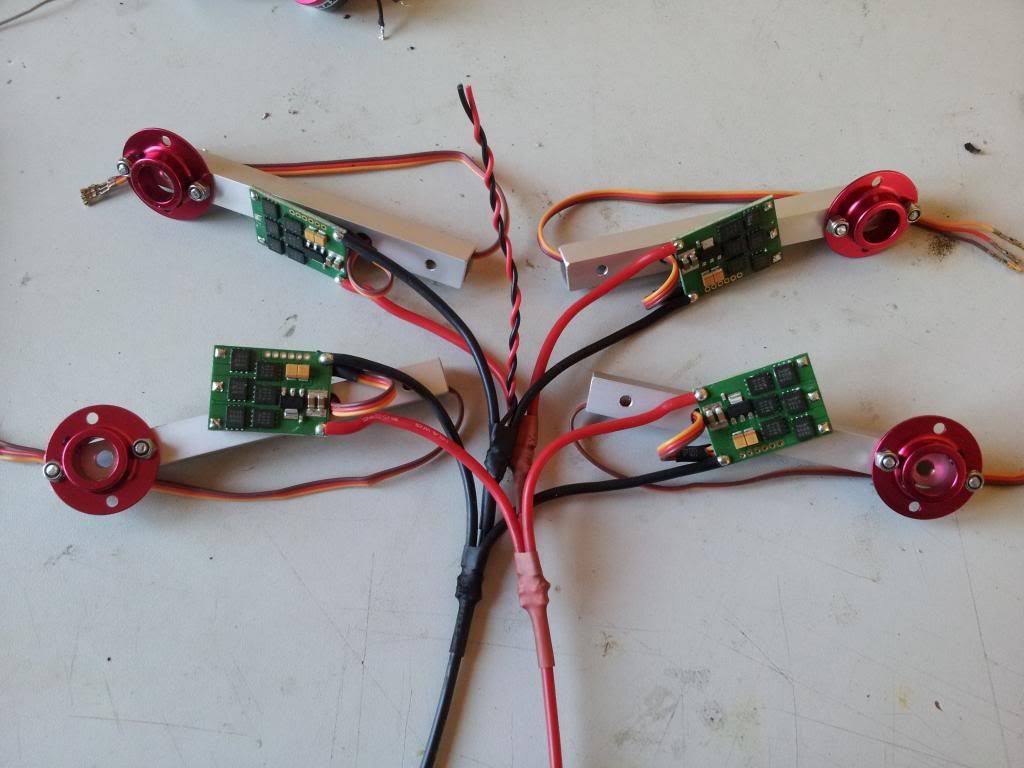
Stekkers eraan zodat er een accu aan kan:

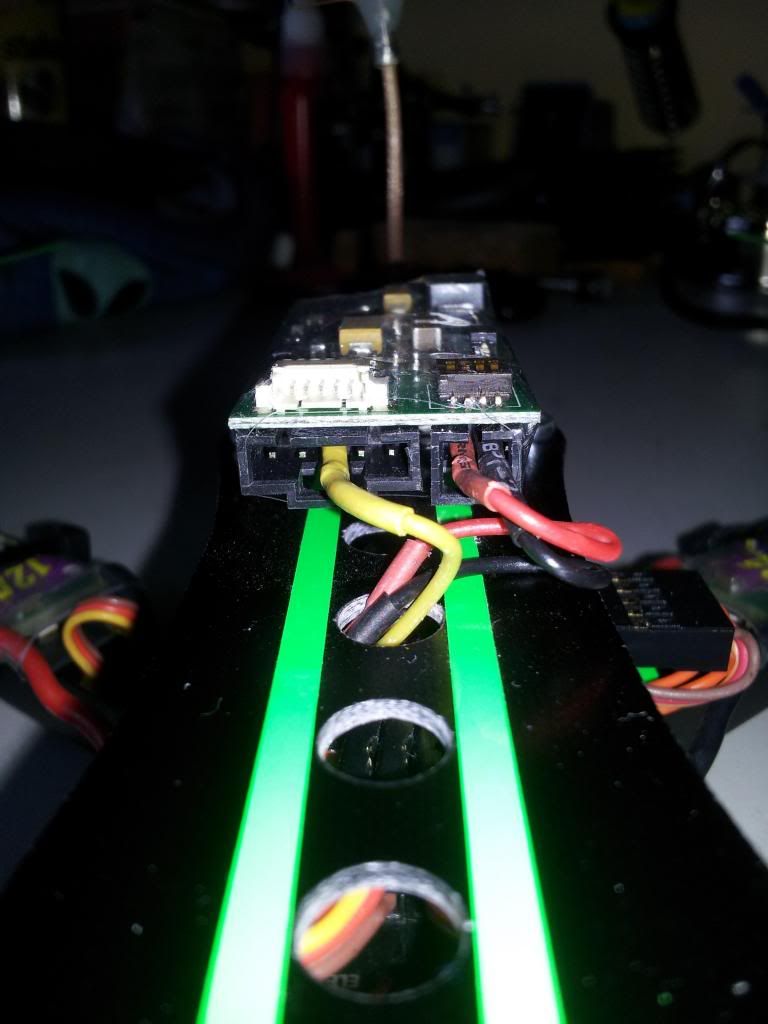
En dan is het tijd om het tussen de frameplaten te sandwitchen.
FPV voeding komt aan de voorkant, aansturingskabels gaan door het grote gat naar boven en stekkers komen aan de achterkant.
Voor dat de armen tussen de frameplaten gaan is het aan te raden eerst de nylon spacers te monteren omdat je daar later wat lastiger bij komt.
De schroeven die de armen vasthouden worden voorzien van revetjes zodat de schroeven de frameplaten niet beschadigen als de armen naar achteren klappen.
De armstoppers krijgen geen revetjes.
De armen worden vast gezet met de buitenste schroeven en de binnenste schroeven zijn om de armen op hun plaats te houden:
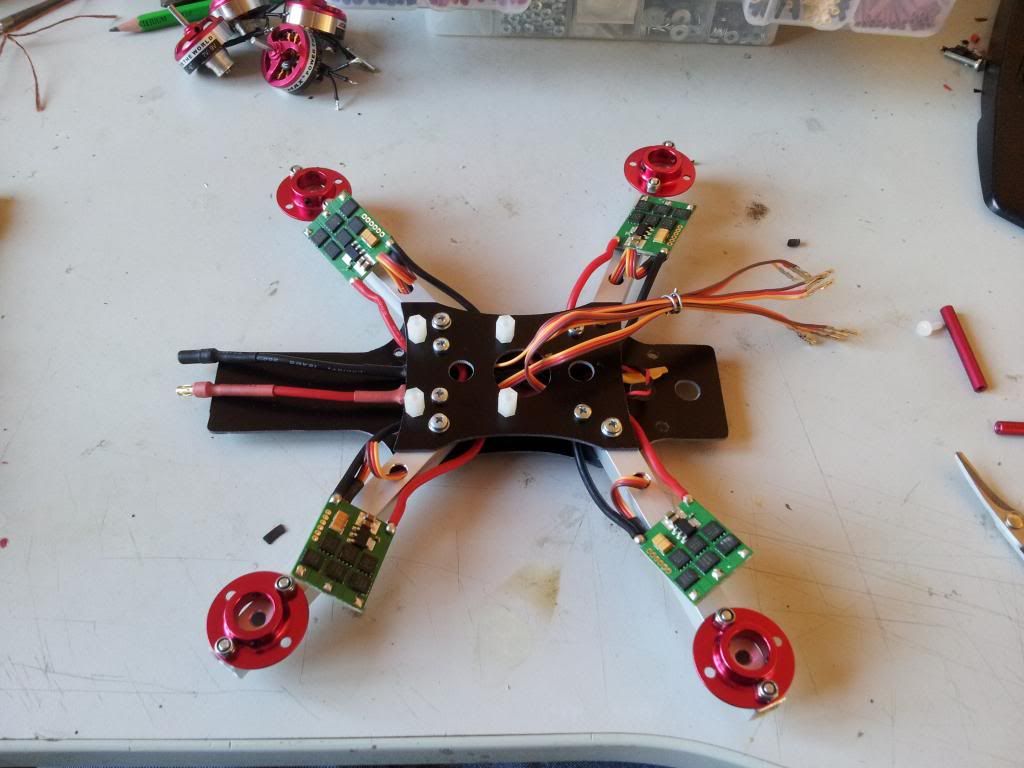
Vervolgens gaan de alu spacers erop:
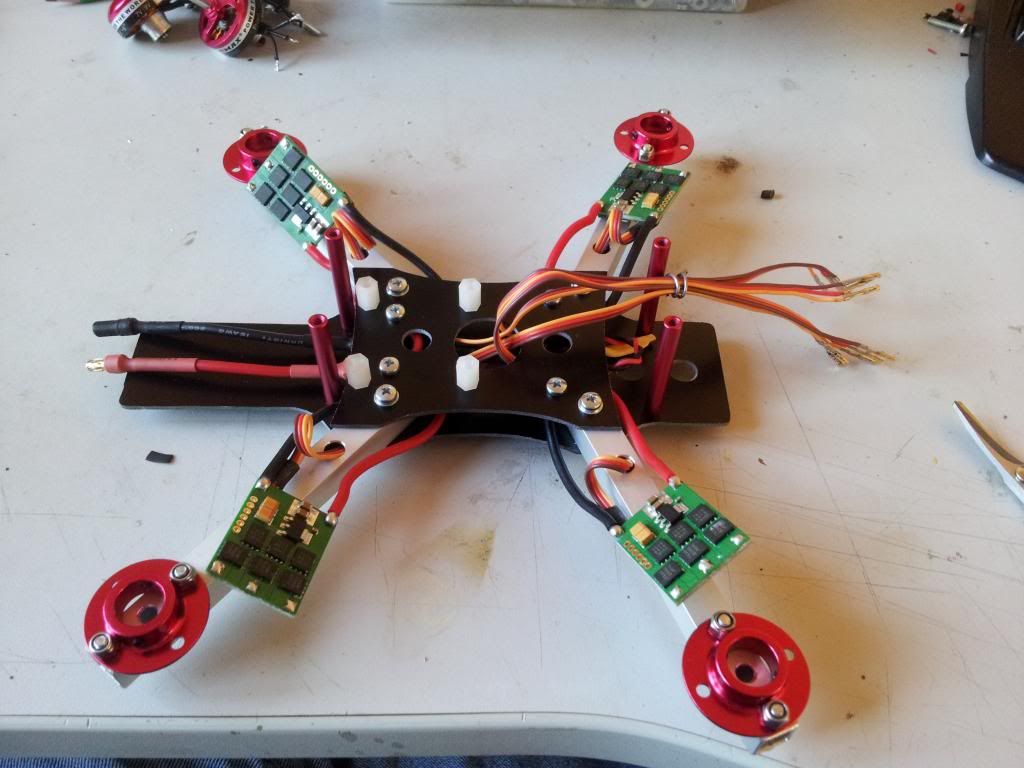
Nu is het tijd om de motoren aan de regelaars te solderen.
Doe alvast krimpkous over de regelaar omdat dat bijna niet meer gaat als de motoren vast zitten:
Vervolgens soldeer je de motordraden op de daarvoor bedoelde soldeer pads op je regelaar.
(Er is tegenwoordig speciale reverse firmware beschikbaar dus je hoeft niet meer bij 2 motoren 2 draden om te wisselen als je flashgereedschap hebt)
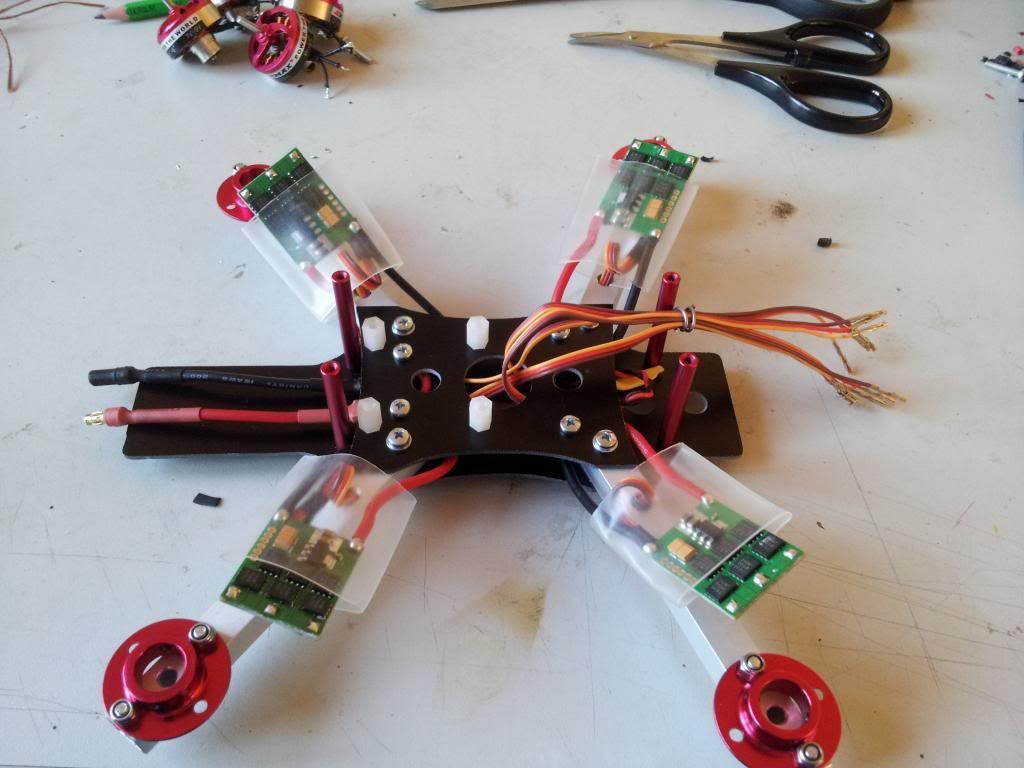
Daarna heb ik het originele labeltje van de regelaars er terug tussen gedaan en de krimpkous netjes laten krimpen:

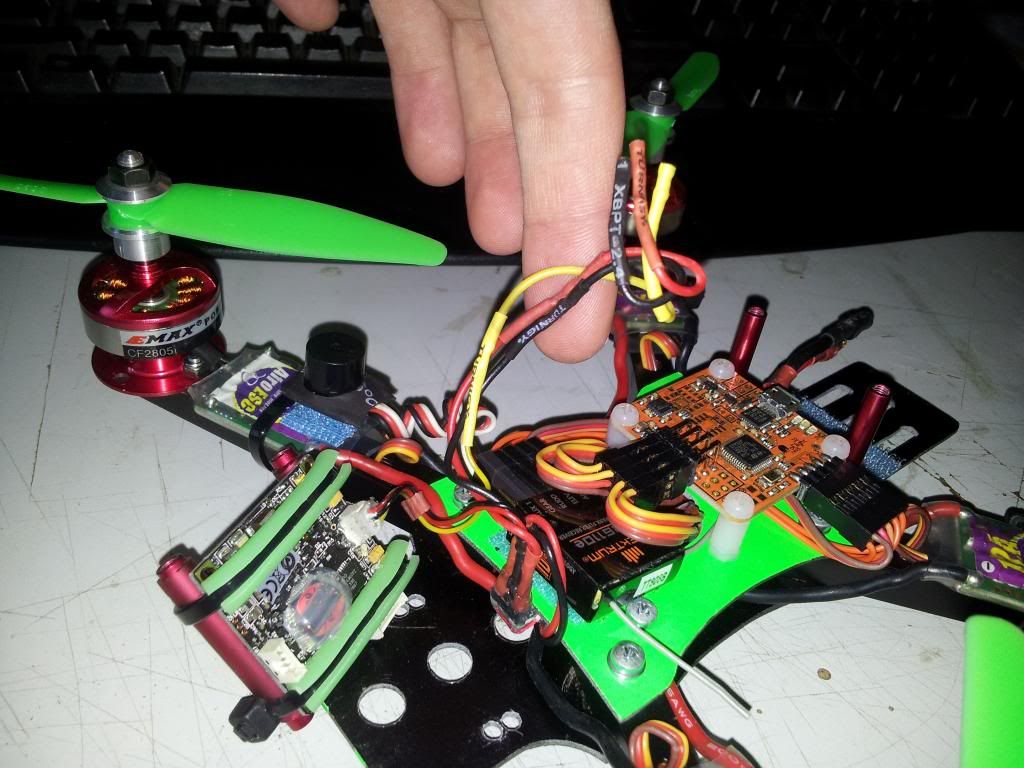
Dan is het tijd om alles vast te zetten. De motoren worden in de voetjes gezet en de grubscrews worden er met een dun laagje locktight stevig op aangedraaid.
Regelaars worden vast gezet met een tyrap.
Dan is het tijd voor propadapters en het Naze32Arco bordje.
Aangezien het een redelijk krap frame is word de hoogte van de Naze32 aangepast aan de dikte van de te gebruiken ontvanger ivm de aansluitingen naar de regelaars die onder 90 graden op de ontvanger gericht zijn. Dit doe je door extra nylon moertjes te gebruiken.

Dan is het tijd om de laatste kabels in te korten, van stekkers te voorzien en aan te sluiten.

Nu is ook een mooi moment om je regelaars te voorzien van de nieuwste firmware en evt reverse firmware.
Motor 1, rechtsachter, CW
Motor 2, rechtsvoor, CCW
Motor 3, linksachter, CCW
Motor 4, linksvoor, CW

Vervolgens nog een stukje klittenband voor de ontvanger, propellers en het topdeck erop:

Nu heb je in principe een vliegbare quadcopter.
Alleen ontvanger toevoegen en gaan met de
Eerste test vlucht:
Tot zover deze build. Binnenkort de uitleg over FPV aansluiten.
Bij deze een simpel bouwverslagje van de FP FQ05.
Dit is een mini quadcopter gebaseert op de TBS Discovery.
Frameplaten worden met de hand gemaakt van 1,5mm G10.
Met dit frame ben ik 3e geworden op de 1e BNL multicopterraces
Wil je ook een FQ05, stuur mij een PBtje.
De onderdelen:
We beginnen met de framekit.
Alle benodigde schroeven worden meegeleverd:
Als aansturing gebruik ik in dit geval de Naze32 Acro:
Om het geheel van stroom te voorzien heb je 11cm rode en zwarte 16AWG kabel nodig:
En een stapel regelaars en motoren,
In dit geval gebruik ik:
- Emaxx 2805 2840kv motoren,
-Afro 12A Regelaars
De armen kan je meebestellen met het frame of zelf maken van 10x10mm alu profiel.
Voor een FQ05 krijg je armen van 10,5 cm, (5" props)
Voor een FQ06 krijg je armen van 12,7 cm. (6" props)
(het enige verschil tussen de FQ05 en de FQ06 is de lengte van de armen)
De gaten om de armen aan het frame te bevestigen komen op 1cm van het uiteinde.
Om de gaten voor de motorbevestiging netjes af te tekenen plak ik eerst wat schilderstape op de armen:
Daarna markeer je de gaten:
En begin je met boren:
Ik begin altijd met 1mm, vervolgens 3mm, en daarna 4mm.
En als dat goed gaat komt het er zo uit te zien en zijn ze klaar voor gebruik:
Bij deze bouw ga ik nog geen FPV spul inbouwen omdat de volgende eigenaar dat zelf wil doen.
Wel houd ik alvast rekening met de stroomtoevoer naar het FPV gebeuren.
Inbouw van FPV spullen zal ik later bijvoegen aan de hand van mn eigen frame.
----------------------------------------------------------------------
De Bouw
We hebben nu dus alles wat we nodig hebben dus kan er begonnen worden aan het bouwen.
Als eerste ga ik de regelaars op dieet zetten.
Dit wegen ze rechtstreeks uit de verpakking:
Aangezien de regelaars op de armen dichtbij de motoren komen te zitten zijn de draden richting de motor alleen maar overbodig gewicht dus die gaan er vanaf.
Ook de stekkers aan de accukant gaan eraf omdat ze aan de kabelboom gesoldeerd gaan worden.
De drie aderige kabel voor de aansturing kort ik nu nog niet in, dat doe ik later zodat ik ze meteen netjes op maat kan knippen.
Als ze alle 4 gedaan zijn houd je zoiets over:
Dan zijn de motoren aan de beurt.
Ook daar zit te lange draad aan die ik ingekort heb.
Nadeel van motordraden inkorten is dat het gaat om lak draden. Als je deze wil solderen hecht de soldeer alleen op het uiteinde waar geknipt is en dat is niet sterk genoeg.
Om te zorgen dat er een sterke verbinding komt zal je een deel van de lak moeten verwijderen. Dit gaat best handig met wat aspirine of paracetamol en een dikke soldeerbout.
Zelf krab ik zoveel mogelijk van de lak weg voor ik ze tussen de soldeerbout en de aspirine duw zodat ik zo kort mogelijk de aspirine hoef te verwarmen.
(lucht die er af komt is niet echt gezond volgens mij)
Als dat gedaan is zul je zien dat de tin wil blijven plakken aan de eindjes en dan zijn ze klaar om aan de regelaars gezet te worden:
Maar voordat ik dat ga doen maak ik eerst de kabelboom.
Als eerste heb ik de zwarte stekkers van de 3aderige kabel gehaald zodat de draad door de armen gevoerd kan worden.
Ik leg een klein lusje in de kabel als trekontlasting. Mocht je nu bij een crash ergens achter blijven hangen met een regelaar word niet je aanstuur kabel doorgesneden door de armen.
Vervolgens de regelaars aan de kabelboom gesoldeerd en alvast draad aangelegd om de FPV set-up te voeden:
Stekkers eraan zodat er een accu aan kan:
En dan is het tijd om het tussen de frameplaten te sandwitchen.
FPV voeding komt aan de voorkant, aansturingskabels gaan door het grote gat naar boven en stekkers komen aan de achterkant.
Voor dat de armen tussen de frameplaten gaan is het aan te raden eerst de nylon spacers te monteren omdat je daar later wat lastiger bij komt.
De schroeven die de armen vasthouden worden voorzien van revetjes zodat de schroeven de frameplaten niet beschadigen als de armen naar achteren klappen.
De armstoppers krijgen geen revetjes.
De armen worden vast gezet met de buitenste schroeven en de binnenste schroeven zijn om de armen op hun plaats te houden:
Vervolgens gaan de alu spacers erop:
Nu is het tijd om de motoren aan de regelaars te solderen.
Doe alvast krimpkous over de regelaar omdat dat bijna niet meer gaat als de motoren vast zitten:
Vervolgens soldeer je de motordraden op de daarvoor bedoelde soldeer pads op je regelaar.
(Er is tegenwoordig speciale reverse firmware beschikbaar dus je hoeft niet meer bij 2 motoren 2 draden om te wisselen als je flashgereedschap hebt)
Daarna heb ik het originele labeltje van de regelaars er terug tussen gedaan en de krimpkous netjes laten krimpen:
Dan is het tijd om alles vast te zetten. De motoren worden in de voetjes gezet en de grubscrews worden er met een dun laagje locktight stevig op aangedraaid.
Regelaars worden vast gezet met een tyrap.
Dan is het tijd voor propadapters en het Naze32Arco bordje.
Aangezien het een redelijk krap frame is word de hoogte van de Naze32 aangepast aan de dikte van de te gebruiken ontvanger ivm de aansluitingen naar de regelaars die onder 90 graden op de ontvanger gericht zijn. Dit doe je door extra nylon moertjes te gebruiken.
Dan is het tijd om de laatste kabels in te korten, van stekkers te voorzien en aan te sluiten.
Nu is ook een mooi moment om je regelaars te voorzien van de nieuwste firmware en evt reverse firmware.
Motor 1, rechtsachter, CW
Motor 2, rechtsvoor, CCW
Motor 3, linksachter, CCW
Motor 4, linksvoor, CW
Vervolgens nog een stukje klittenband voor de ontvanger, propellers en het topdeck erop:
Nu heb je in principe een vliegbare quadcopter.
Alleen ontvanger toevoegen en gaan met de
Eerste test vlucht:
Tot zover deze build. Binnenkort de uitleg over FPV aansluiten.
Laatst bewerkt door een moderator:


")






