Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het Wiimulticopter draadje
- Topicstarter imre43
- Startdatum
Micropuller
Forum veteraan
Ok, thanks Hugy!
Inmiddels even een "zender" in elkaar geknutseld van twee analoge joystickjes en een arduino die ik nog had liggen en meteen de uitslagen gekalibreerd.
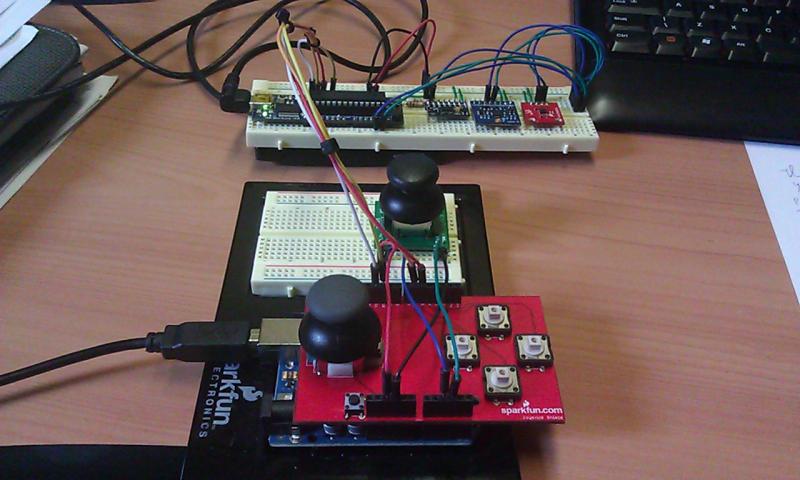
Terwijl ik daarmee bezig was kwam er een mailtje binnen met de mededeling dat mijn PARIS semi-naked bordje onderweg is, dus dat wordt knutselen binnekort
Inmiddels even een "zender" in elkaar geknutseld van twee analoge joystickjes en een arduino die ik nog had liggen en meteen de uitslagen gekalibreerd.
Terwijl ik daarmee bezig was kwam er een mailtje binnen met de mededeling dat mijn PARIS semi-naked bordje onderweg is, dus dat wordt knutselen binnekort
Laatst bewerkt door een moderator:
De Gyro word iedere keer als je hem aansluit gecalibreerd, maar je kunt het ook handmatig met de stick combi calibreren.Als ik het goed begrepen heb zou je om de gyro te calibreren de Throttle en Pitch helemaal dicht moeten zetten en de Yaw helemaal naar links. Maar dit kan waarschijnlijk alleen maar als er een zender op de Arduino is aangesloten (geweest), klopt dat?
Edit: laat maar, zo te zien gaat dat dus alleen met stickinput van de zender. Ik had gehoopt dat dit ook gewoon in de GUI te simuleren was.
Micropuller
Forum veteraan
Ok, gaat automatisch dus. Ik vond het al zo vreemd dat er zulke nette waarden uit kwamen. Alweer bedankt, Kees!
Inmiddels alweer een mailtje ontvangen dat de Pro Micro ook op de bus is gegaan, dus die zal morgen wel op de mat ploffen, samen met de AVR programmer (en ja, ik heb ook esc's besteld, maar die staan dus nog even in backorder)
Inmiddels alweer een mailtje ontvangen dat de Pro Micro ook op de bus is gegaan, dus die zal morgen wel op de mat ploffen, samen met de AVR programmer (en ja, ik heb ook esc's besteld, maar die staan dus nog even in backorder)
Micropuller
Forum veteraan
Pro Micro bordje is binnen. Wat een klein prutdingetje zeg!
Helaas niet direct compatibel, er komt wat gefreubel met drivers etc. aan te pas, maar inmiddels heb ik "Blink" werkend.
Pinout is niet helemaal 1:1 vergelijkbaar met een Pro Mini, maar ik zag dat er al een oplossing voor is gevonden.
Het lijkt erop dat, aangezien de PWM resolutie hoger is, de multi ook stabieler blijft. Kijk, dat is dan wel weer leuk om te horen!

Helaas niet direct compatibel, er komt wat gefreubel met drivers etc. aan te pas, maar inmiddels heb ik "Blink" werkend.
Pinout is niet helemaal 1:1 vergelijkbaar met een Pro Mini, maar ik zag dat er al een oplossing voor is gevonden.
Het lijkt erop dat, aangezien de PWM resolutie hoger is, de multi ook stabieler blijft. Kijk, dat is dan wel weer leuk om te horen!
hardware:
- FC = Promicro
- Gyro = ginue WMP
- ACC = BMA020
- ESC's = 4 Dymond Smart 10 (similar to turnergy Plush) with sil-F334 chip (ginue software)
- Motors = 4x Scorpio S2208 (with 8x3,8 APC)
- RX = Spectrum DX6
- Lipo = 3s 3200mAh
- motor to motor diameter (X) = ~37cm (its asynchronous)
first test - does it fly?:
- it does
second test - cross test promicro vs. promini..
setup:
- same copter
- same sensors
- same reciver
- same WMC ver.
results:
- both fly well
- max P on promini = 3,5 (I and D are default)
- max P on promicro = 8 ! (I and D are default)
- promicro feels like twice stable as with promini (i think thats because of more then twice P)
so i think the high res PWM rocks !
")
")
Micropuller
Forum veteraan
Inmiddels draait de boel op het pro micro bordje. Helaas is de pin-out van de pro micro nogal anders dan die van de pro mini, dus als ik de micro wil gebruiken (wat wel verleidelijk is, ik ben wel benieuwd naar die hogere resolutie), zal ik bijna zelf een pcb'tje moeten gaan freubelen.
Dan heb ik dus nog de PARIS V4.0, een pro mini en de Wii gyro en accelerometer over. Ach ja, maken we daar een "oldschool" bordje van, ook leuk om eens te proberen.
Dan heb ik dus nog de PARIS V4.0, een pro mini en de Wii gyro en accelerometer over. Ach ja, maken we daar een "oldschool" bordje van, ook leuk om eens te proberen.
Hallo ik ben bezig aan een mini quadcopter flydumini met een freeimu 0.4.3 ik ben vandaag begonnen aan de multiwii code erop te zetten maar zit met een probleem achter het flashen heb ik hem volledig gekalibreerd via de multiwii software via win en als ik meteen vlieg is er geen vuil aan de lucht. Maar als ik de batterij even ontkoppel en ik wil terug proberen. Dan lukt het niet meer ik krijg hem niet meer in de lucht. Het is net of de Freeimu terug standaard is
Kan er hier iemand mij helpen?
Kan er hier iemand mij helpen?
Laatst bewerkt door een moderator: