Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
LUA Scripting voor o.a. Taranis
- Topicstarter Richardoe
- Startdatum
deze heeft gps nodig en als je dat op je apm hebt zou het moeten kunnen. En logging altijd aan in je taranis dan had je de laatste coordinaten ook gehad
Mijn quad ligt nu uitelkaar en moet eerst weer worden opgebouwd, maar als het zover is ga ik zeker het script proberen met de APM
@dutchronnie laat maar weten als ik kan helpen.
@FGRacer, als volgt in Special Functions:

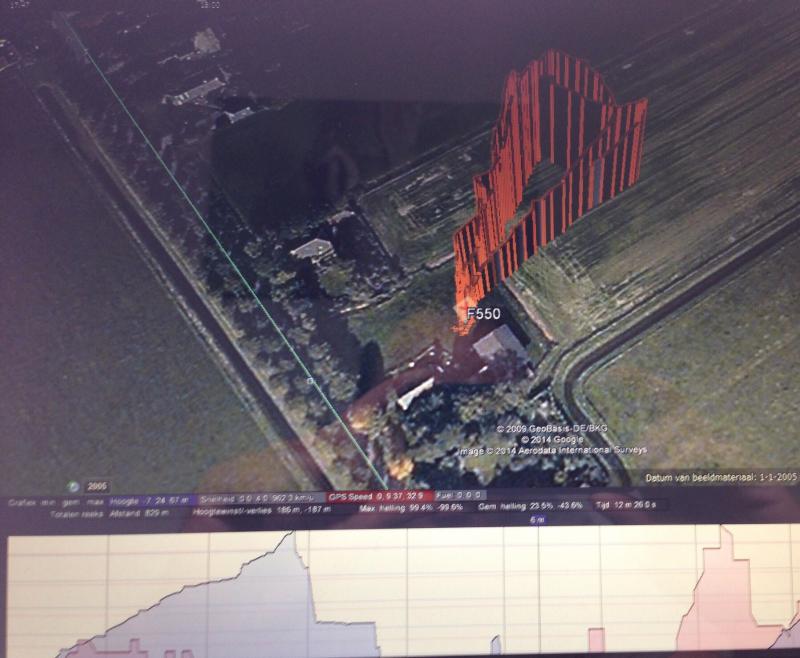
dan logging dus van alles, je stick standen, telemetrie, voltages, GPS etc. GPS kan je dan weer gebruik om een KML file voor Google Earth te maken, kan je precies zien hoe je gevlogen hebt etc.
en dus ook om je MC weer terug te vinden")
@FGRacer, als volgt in Special Functions:
dan logging dus van alles, je stick standen, telemetrie, voltages, GPS etc. GPS kan je dan weer gebruik om een KML file voor Google Earth te maken, kan je precies zien hoe je gevlogen hebt etc.
en dus ook om je MC weer terug te vinden
Laatst bewerkt door een moderator:
Class dismissed! Now go out and fly!
:celebrate:
Deze kan misschien in het al bestaande script verwerkt worden of apart of zo, ik ben nog aan het lezen daar, ziet er interessant uit, volgens mij geeft die je homepoint aan met Hback..
Bron: gheadng.lua - A Lua script to get the GPS Heading. - RC Groups
Bron: gheadng.lua - A Lua script to get the GPS Heading. - RC Groups
Code:
--gheadng.lua
--Written by Fig Newton (Isaac Davis) 6/5/2014
--This lua script will give you a heading output variable you can use.
--It's accuracy depends on how well the gps is locked in, and also how much
--you are moving. The more you move, the more accurate this is.
--V1.0 6/6/14
--V1.1 6/7/14
--V1.2 6/8/14 - Added in multiple headings and average.
--V1.3 6/8/14 - Fixed a dumb mistake in the averaging calculation.
--V1.4 6/9/14 - Added in arrays so you can choose how many location points you want to average. Also changed
-- the output names. Found an even bigger mistake in the heading averaging.
--V1.5 7/19/14 - Corrected the constants for Pilot-Latitude and Pilot-Longitude. Script was erroring out in OpenTX v.2.0.7. It's
-- now v2.0.7+ compatible.
local outputs = { "PHDG", "Hout", "Hbak","Lon", "Lat", "Timr" }
--Lets the user pick the sampling rate. Every 30 cycles is about a second. It all depends on
--how fast the lua model scripts run.
--Sample num is the number of location points taken and calculated to compute heading
local inputs = { {"SamplDelay", VALUE, 10, 150, 30}, {"Sample Num", VALUE, 2, 8, 3} }
local headtmp
local timz
local lat = {0,0,0,0,0,0,0,0,0,0}
local lon = {0,0,0,0,0,0,0,0,0,0}
local heading = {0,0,0,0,0,0,0,0,0,0}
--Set up the variables.
local function init()
headtmp=0
headtoh=0
headfromh=0
z1=0
z2=0
timz = 0
pilotlat = getValue("pilot-latitude")
pilotlon = getValue("pilot-longitude")
end
--Function to average headings. Note I found this has to be above the run function otherwise it seems the interpreter cannot
--find it.
local function avpts(heading1, heading2)
if heading1-heading2 > 180 then
heading2=heading2+360
end
if heading2-heading1 > 180 then
heading1=heading1+360
end
local averageheading = (heading1+heading2)/2
if averageheading >= 360 then
averageheading = averageheading - 360
end
return averageheading
end
local function run_func( sample, snum )
--local smpl = sample
--Increment the sample delay
timz=timz+1
--It's time to take a location reading
if timz >= sample then
headtmp = 0
--Since the pilot location could have been blank on the init, let's grab it again to be safe.
pilotlat = getValue("pilot-latitude")
pilotlon = getValue("pilot-longitude")
--Push all the locations previously read to the back. This scrolls the locations.
for loop=1 , snum-1 do
lat[loop] = lat[loop+1]
lon[loop] = lon[loop+1]
end
lat[snum] = getValue("latitude")
lon[snum] = getValue("longitude")
-- Test Values
-- pilotlat=45.5660
-- pilotlon=120.5665
-- lat[1]=45.5635
-- lat[2]=45.5645
-- lat[3]=45.5645
-- lon[1]=120.5665
-- lon[2]=120.5665
-- lon[3]=120.5666
-- Check the current and previous locations to make sure they aren't 0. 0 means no gps lock.
if lat[snum-1]~=0 and lat[snum]~=0 and lon[snum-1]~=0 and lon[snum]~=0 then
--Loop through the locations and calculate a heading for each pair
for calcloop = 1 , snum-1 do
z1 = math.sin(math.rad(lon[calcloop+1]) - math.rad(lon[calcloop])) * math.cos(math.rad(lat[calcloop+1]))
z2 = math.cos(math.rad(lat[calcloop])) * math.sin(math.rad(lat[calcloop+1])) - math.sin(math.rad(lat[calcloop])) * math.cos(math.rad(lat[calcloop+1])) * math.cos(math.rad(lon[calcloop+1]) - math.rad(lon[calcloop]))
heading[calcloop] = math.deg(math.atan2(z1, z2))
--Fix negative values
if heading[calcloop] < 0 then
heading[calcloop]=heading[calcloop]+360
end
end
-- take the average of the headings
headtmp = heading[1]
--Loop through the next headings if there are more than 3 sample locations
if snum>2 then
for avgloop = 2 , snum-1 do
headtmp = avpts(headtmp, heading[avgloop])
end
end
else --GPS readings are still 0, so no GPS lock has been obtained. Return 0.
headtmp=0
end
--Then we calculate the heading from the pilot position to the current position.
if pilotlat~=0 and lat[snum]~=0 and pilotlon~=0 and lon[snum]~=0 then
z1 = math.sin(math.rad(lon[snum]) - math.rad(pilotlon)) * math.cos(math.rad(lat[snum]))
z2 = math.cos(math.rad(pilotlat)) * math.sin(math.rad(lat[snum])) - math.sin(math.rad(pilotlat)) * math.cos(math.rad(lat[snum])) * math.cos(math.rad(lon[snum]) - math.rad(pilotlon))
headfromh = math.deg(math.atan2(z1, z2))
if headfromh < 0 then
headfromh=headfromh+360
end
--Subtract 180 and get the heading to get back home.
headtoh = headfromh-180
if headtoh < 0 then
headtoh = headtoh+360
end
else
headfromh = 0
headtoh = 0
end
--Zero out the timer for the sample delay.
timz = 0
end
--Return: Current heading, current latitude, current longitude, heading from home, heading to home
return headtmp*10.24, headfromh*10.24, headtoh*10.24, lon[snum]*10.24, lat[snum]*10.24, timz*10.24
end
-- Return statement
return { run=run_func, output=outputs, init=init, input=inputs}
De bron van dat scherm heb ik wel gevonden, maar het is voor een andere FC..:2gunfire:
https://github.com/lvale/MavLink_FrSkySPort
Deze kwam ik ook nog tegen..
http://api.viglink.com/api/click?fo...quetzal.homepage.bluewin.ch/ArduIMU_SPort.zip
https://github.com/lvale/MavLink_FrSkySPort
Deze kwam ik ook nog tegen..
http://api.viglink.com/api/click?fo...quetzal.homepage.bluewin.ch/ArduIMU_SPort.zip
Laatst bewerkt door een moderator:
Nee gewone Naze32 Richard alles in Baseflight stond goed :
11,7 v in setup baseflight.
telemetry_provider = 0
telemetry_port = 0
telemetry_switch = 0
vbatscale = 110
currentscale = 400
currentoffset = 0
multiwiicurrentoutput = 0
vbatmaxcellvoltage = 42
vbatmincellvoltage =
Maar opgelost heel simpel eigelijk. In Baseflight gewoon even telemetry uitgezet, toen effe gereboot en toen weer aangezet et voilaaaa nu ziet hij hem als 3 cell ") . 34
. 34
alles in Baseflight stond goed :11,7 v in setup baseflight.
telemetry_provider = 0
telemetry_port = 0
telemetry_switch = 0
vbatscale = 110
currentscale = 400
currentoffset = 0
multiwiicurrentoutput = 0
vbatmaxcellvoltage = 42
vbatmincellvoltage =
Maar opgelost
heel simpel eigelijk. In Baseflight gewoon even telemetry uitgezet, toen effe gereboot en toen weer aangezet et voilaaaa nu ziet hij hem als 3 cell . 34
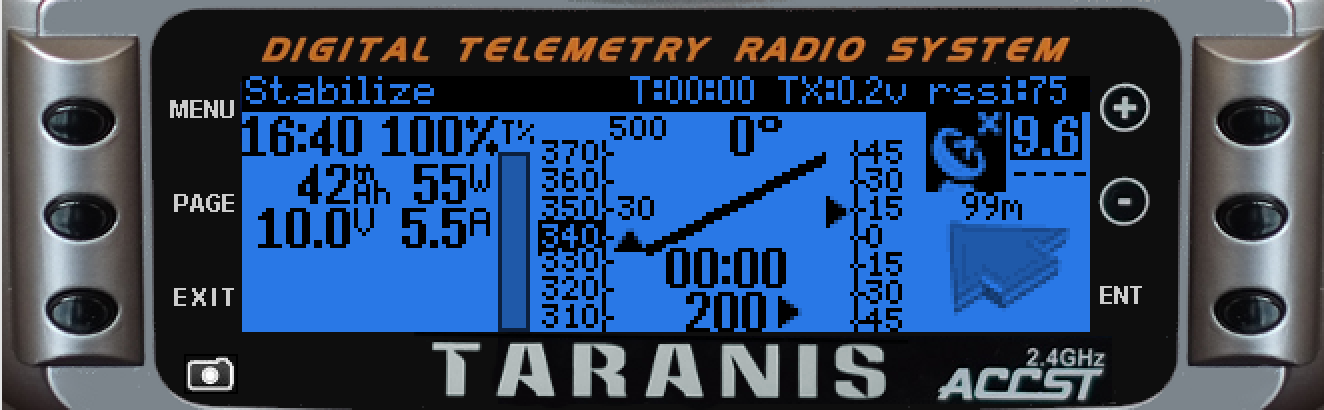
Ja is echt leuk dit, heb ook even de modes op andere sticks gezet in het script en nu nog even geluidjes erbij zetten
Waar maak je de lua scripts eigenlijk in ? Want hoe bepaal je de positie en waar wat terecht komt ? Of heb je gewoon een template gepakt ? Zou mooi zijn als er een proggie was met een soort schermpje ter grote van de display zodat je kon zien waar wat komt
Waar maak je de lua scripts eigenlijk in ? Want hoe bepaal je de positie en waar wat terecht komt ? Of heb je gewoon een template gepakt ? Zou mooi zijn als er een proggie was met een soort schermpje ter grote van de display zodat je kon zien waar wat komt
Zijn gewoon x,y coordinaten zoveel posities heb je niet, ik edit in luaadit, save en kan het dan in companion direct zien. Betere oplossing heb ik nog niet gevonden.
En voor alles is al wel wat dus je begint al snel met een script van iemand anders, precies zoals je de jouwe nu ook gemaakt hebt dus.
En voor alles is al wel wat dus je begint al snel met een script van iemand anders, precies zoals je de jouwe nu ook gemaakt hebt dus.
Is er ergens een site waar er verzamelingen van scrips bij elkaar staan?
ik heb al wat gezocht maar zo heel veel heb ik nog niet kunnen vinden buiten die ene voor een andere FC.
Is dit ook niet bruikbaar zoals die eerdere of kan je deze recyclen?
Voor iemand met een ardupilot/copter en Taranis is hij wel leuk in ieder geval.
ik heb al wat gezocht maar zo heel veel heb ik nog niet kunnen vinden buiten die ene voor een andere FC.
Is dit ook niet bruikbaar zoals die eerdere of kan je deze recyclen?
Voor iemand met een ardupilot/copter en Taranis is hij wel leuk in ieder geval.
Code:
-- Copyright Luis Vale Gonçalves.
-- This program is free software: you can redistribute it and/or modify
-- it under the terms of the GNU General Public License as published by
-- the Free Software Foundation, either version 3 of the License, or
-- (at your option) any later version.
--
-- This program is distributed in the hope that it will be useful,
-- but WITHOUT ANY WARRANTY; without even the implied warranty of
-- MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
-- GNU General Public License for more details.
--
-- A copy of the GNU General Public License is available at <http://www.gnu.org/licenses/>.
--
-- Arducopter Only.
--Auxiliary files on github under dir BMP and SOUNDS/en
-- https://github.com/lvale/MavLink_FrSkySPort/tree/DisplayAPMPosition/Lua_Telemetry/DisplayApmPosition
-- don't confuse these with Christian's files
--Landing Gear to.do - perhaps move to a Function script to activate LG automatically
--Gimbal position to.do - position reporting only
--User configurable
Switches ={}
for i=1, 6 do
Switches[i] = {}
Switches[i].LogicalSwitch=99+i
Switches[i].FlightNumber=1
end
--These must be changed to correspond to what is defined as Flight Modes 1 to 6 on the PixHawk.
-- I didn't find a way to retrieve these automatically from the FC
-- These can be set in the future by a function script. TBD
Switches[1].FlightNumber=1 -- these correspond to the Logical Switches defined on the Radio - L1 is 1 =Stabilize
Switches[2].FlightNumber=3 -- these correspond to the Logical Switches defined on the Radio - L2 is 3 =Altitude Hold
Switches[3].FlightNumber=6 -- these correspond to the Logical Switches defined on the Radio - L3 is 6 =Loiter
Switches[4].FlightNumber=1 -- these correspond to the Logical Switches defined on the Radio - L4 is 1 =Stabilize
Switches[5].FlightNumber=17 -- these correspond to the Logical Switches defined on the Radio - L5 is 17 =Position Hold
Switches[6].FlightNumber=12 -- these correspond to the Logical Switches defined on the Radio - L6 is 12 =Drift
--Init Variables
local eff=0
local consumption_max=0
local cell_nr=0
local cellv=0
local cap_est=0
local battremaining=1
local zerobattery=0
local zerocap=1
local SumFlight=0
local repeatplay=0
local SwitchFlag=0
local lastarmed=0
local apmarmed=0
local LastSwitchPos=0
local SwitchPos=0
local FmodeNr=13 -- This is an invalid flight number when no data available
local Engaged=0
local last_flight_mode = 0
local last_flight_mode_play = 0
--Timer 0 is time while vehicle is armed
model.setTimer(0, {mode=0, start=0, value= 0, countdownBeep=0, minuteBeep=1, persistent=1})
--Timer 1 is accumulated time per flight mode
model.setTimer(1, {mode=0, start=0, value= 0, countdownBeep=0, minuteBeep=0, persistent=1})
--Init Flight Tables
FlightMode = {}
for i=1, 17 do
FlightMode[i] = {}
FlightMode[i].Name=""
FlightMode[i].SoundActive1="/SOUNDS/en/AVFM"..(i-1).."A.wav"
FlightMode[i].SoundEngaged1="/SOUNDS/en/AVFM"..(i-1).."E.wav"
FlightMode[i].Repeat=1
FlightMode[i].Timer=0
end
FlightMode[1].Name="Stabilize"
FlightMode[1].Repeat=300
FlightMode[2].Name="Acro"
FlightMode[2].Repeat=300
FlightMode[3].Name="Altitude Hold"
FlightMode[3].Repeat=300
FlightMode[4].Name="Auto"
FlightMode[4].Repeat=60
FlightMode[5].Name="Guided"
FlightMode[5].Repeat=60
FlightMode[6].Name="Loiter"
FlightMode[6].Repeat=300
FlightMode[7].Name="Return to launch"
FlightMode[7].Repeat=15
FlightMode[8].Name="Circle"
FlightMode[8].Repeat=300
FlightMode[9].Name="Invalid Mode"
FlightMode[9].Repeat=15
FlightMode[10].Name="Land"
FlightMode[10].Repeat=15
FlightMode[11].Name="Optical Loiter"
FlightMode[11].Repeat=300
FlightMode[12].Name="Drift"
FlightMode[12].Repeat=300
FlightMode[13].Name="Invalid Mode"
FlightMode[13].Repeat=15
FlightMode[14].Name="Sport"
FlightMode[14].Repeat=60
FlightMode[15].Name="Flip Mode"
FlightMode[15].Repeat=15
FlightMode[16].Name="Auto Tune"
FlightMode[16].Repeat=30
FlightMode[17].Name="Position Hold"
FlightMode[17].Repeat=300
--Init Severity Tables
Severity={}
Severity[1]={}
Severity[1].Name=""
for i=2,9 do
Severity[i]={}
Severity[i].Name=""
Severity[i].Sound="/SOUNDS/en/ER"..(i-2)..".wav"
end
Severity[2].Name="Emergency"
Severity[3].Name="Alert"
Severity[4].Name="Critical"
Severity[5].Name="Error"
Severity[6].Name="Warning"
Severity[7].Name="Notice"
Severity[8].Name="Info"
Severity[9].Name="Debug"
local apm_status_message = {severity = 0, textnr = 0, timestamp=0}
--Init A registers
local A2 = model.getTelemetryChannel(1)
if A2 .unit ~= 3 or A2 .range ~=1024 or A2 .offset ~=0
then
A2.unit = 3
A2.range = 1024
A2.offset = 0
model.setTelemetryChannel(1, A2)
end
local A3 = model.getTelemetryChannel(2)
if A3.unit ~= 3 or A3.range ~=362 or A3.offset ~=-180
then
A3.unit = 3
A3.range = 362
A3.offset = -180
A3.alarm1 = -180
A3.alarm2 = -180
model.setTelemetryChannel(2, A3)
end
local A4 = model.getTelemetryChannel(3)
if A4.unit ~= 3 or A4.range ~=362 or A4.offset ~=-180
then
A4.unit = 3
A4.range = 362
A4.offset = -180
A4.alarm1 = -180
A4.alarm2 = -180
model.setTelemetryChannel(3, A4)
end
--Aux Display functions and panels
local function vgauge(vx, vy, vw, vh, value, vmax, look, max, min) -- look use GREY_DEFAULT+FILL_WHITE
if value>vmax then
vmax=value
end
local vh1 =(vh * value / vmax)
local vy1 = (vy + (vh - vh1))
lcd.drawFilledRectangle(vx, vy1, vw, vh1, look)
lcd.drawRectangle(vx, vy ,vw, vh,SOLID,2)
if max~=0 and max<=vmax then
vh1 =(vh * max / vmax)
vy1 = (vy + (vh - vh1))
lcd.drawPixmap (vx+vw,vy1-3,"/SCRIPTS/BMP/larrow.bmp")
--lcd.drawLine(vx,vy1,vx+vw,vy1,SOLID,2)
end
if min~=0 then
local vh1 =(vh * min / vmax)
vy1 = (vy + (vh - vh1))
lcd.drawPixmap (vx+vw,vy1-3,"/SCRIPTS/BMP/larrow.bmp")
--lcd.drawLine(vx,vy1,vx+vw,vy1,SOLID,2)
end
end
local function round(num, idp)
local mult = 10^(idp or 0)
return math.floor(num * mult + 0.5) / mult
end
local function gpspanel()
telem_t1 = getValue(209) -- Temp1
telem_lock = 0
telem_sats = 0
telem_lock = telem_t1%10
telem_sats = (telem_t1 - (telem_t1%10))/10
if telem_lock >= 3 then
lcd.drawPixmap (171, 9, "/SCRIPTS/BMP/gps.bmp")
lcd.drawText (192, 21, telem_sats.."sat", 0)
elseif telem_lock>1 then
lcd.drawPixmap (171, 9, "/SCRIPTS/BMP/gps2.bmp")
lcd.drawText (192, 21, telem_sats.."sat", 0)
else
lcd.drawPixmap (171, 9, "/SCRIPTS/BMP/gps0.bmp")
lcd.drawText (192, 21, "----", 0)
end
hdop=round(getValue(203))
if hdop <20 then
lcd.drawNumber (196, 9, hdop, 0+PREC1+LEFT+MIDSIZE )
else
lcd.drawNumber (196, 9, hdop, 0+PREC1+LEFT+BLINK+INVERS+MIDSIZE)
end
pilotlat = getValue("pilot-latitude")
pilotlon = getValue("pilot-longitude")
curlat = getValue("latitude")
curlon = getValue("longitude")
if pilotlat~=0 and curlat~=0 and pilotlon~=0 and curlon~=0 then
z1 = math.sin(math.rad(curlon) - math.rad(pilotlon)) * math.cos(math.rad(curlat))
z2 = math.cos(math.rad(pilotlat)) * math.sin(math.rad(curlat)) - math.sin(math.rad(pilotlat)) * math.cos(math.rad(curlat)) * math.cos(math.rad(curlon) - math.rad(pilotlon))
headfromh = math.deg(math.atan2(z1, z2))
if headfromh < 0 then
headfromh=headfromh+360
end
headtoh = headfromh-180
if headtoh < 0 then
headtoh = headtoh+360
local integHead=round(headtoh/45)
lcd.drawPixmap(171,33,"/SCRIPTS/BMP/"..integHead..".bmp")
end
else
headfromh = 0
headtoh = 0
lcd.drawPixmap(171,33,"/SCRIPTS/BMP/NOGPS.bmp")
end
lcd.drawText(180, 29, getValue(212).."m", 0)
end
local function speedpanel()
lcd.drawTimer(106,42,model.getTimer(0).value,MIDSIZE)
lcd.drawNumber(132, 53,getValue(211),MIDSIZE)
lcd.drawPixmap(lcd.getLastPos()+2, 55,"/SCRIPTS/BMP/rarrow.bmp")
end
local function pitchpanel()
lcd.drawLine (153, 15, 153, 63, SOLID, 0)
for w=6, 0, -1 do
lcd.drawLine (151, 58-w*48/7+3, 155, 58-w*48/7+3, SOLID, 0)
lcd.drawNumber (156,58-w*48/7, math.abs(w*15-45), LEFT+SMLSIZE)
end
--ypitch
local pitch=getValue(205)*10
if math.abs(pitch)<=45 then
lcd.drawPixmap (146,58-(pitch+45)*42/90,"/SCRIPTS/BMP/rarrow.bmp")
elseif pitch<45 then lcd.drawPixmap(144,39,"/SCRIPTS/BMP/darrow3.bmp")
elseif pitch>45 then lcd.drawPixmap(144,17,"/SCRIPTS/BMP/uarrow3.bmp")
end
end
local function altpanel()
altitude = getValue(206)
galtitude= getValue(213)
aspd=getValue(225)
lcd.drawLine (90, 15, 90, 63, SOLID, 0)
if math.abs(altitude) <= 10 then
yinc=1
elseif math.abs(altitude) <=30 then
yinc=5
else
yinc=10
end
for az=3, -3, -1 do
lcd.drawLine (88, 58-az*48/7-21+3, 92, 58-az*48/7-21+3, SOLID, 0)
if az~=0 then
lcd.drawNumber (75,58-az*48/7-24+3,(((math.ceil(altitude/yinc))*yinc)+az*yinc), LEFT+SMLSIZE)
else
lcd.drawNumber (75,58-az*48/7-24+3,(altitude+az*yinc), LEFT+SMLSIZE+INVERS)
end
end
--Alt max
lcd.drawText(92,10,getValue(237),SMLSIZE)
end
local function vspeedpanel()
vspd= getValue(224)
if vspd >0 then
lcd.drawPixmap(93, 38,"/SCRIPTS/BMP/uarrow.bmp")
else
lcd.drawPixmap(93, 38,"/SCRIPTS/BMP/darrow.bmp")
end
lcd.drawNumber(94, 30,vspd,LEFT+SMLSIZE)
end
local function rollpanel()
local rangle=math.rad(getValue(204)*10)
local rx2=145
local rx1=100
local ry1=round(32-20*math.sin(rangle))
local ry2=round(32+20*math.sin(rangle))
lcd.drawLine (rx1,ry1-1 ,rx2, ry2-1, SOLID, 2)
lcd.drawLine (rx1,ry1 ,rx2, ry2, SOLID, 2)
lcd.drawLine (rx1,ry1+1 ,rx2, ry2+1, SOLID, 2)
end
local function headingpanel()
lcd.drawNumber(129, 9,getValue(223),MIDSIZE)
lcd.drawText(lcd.getLastPos(),9,"\64",MIDSIZE)
end
local function toppanel()
lcd.drawFilledRectangle(0, 0, 212, 9, 0)
if apmarmed==1 then
lcd.drawText(1, 0, (FlightMode [FmodeNr].Name), INVERS)
else
lcd.drawText(1, 0, (FlightMode [FmodeNr].Name), INVERS+BLINK)
end
lcd.drawText(94, 0, " T:", INVERS)
lcd.drawTimer(lcd.getLastPos(),0,model.getTimer(1).value,INVERS)
lcd.drawText(134, 0, "TX:"..getValue(189).."v", INVERS)
lcd.drawText(172, 0, "rssi:" .. getValue(200), INVERS)
end
local function powerpanel()
--Used on power panel -- still to check if all needed
local power=getValue(207)
local battremaining = (power%100)*cap_est/zerocap --battery % remaining reported adjusted to initial reading
local throttle = (power-(power%100))/100 --throttle reported
local tension=getValue(216) --
local current=getValue(217) ---
local consumption=getValue(218)--
local watts=getValue(219) ---
local tension_min=getValue(246) --
local current_max=getValue(247) ---
local watts_max=getValue(248) ---
if battremaining~=consumption_max then
eff=battremaining*model.getTimer(0).value/(zerocap-battremaining)
consumption_max=battremaining
end
if (eff-model.getTimer(0).value)<0 then
lcd.drawText(0,9,"calc",MIDSIZE+BLINK)
else
lcd.drawTimer(0,9,eff-model.getTimer(0).value,MIDSIZE)
end
lcd.drawNumber(lcd.getLastPos()+25,9,round(battremaining),MIDSIZE)
lcd.drawText(lcd.getLastPos(),9,"%",MIDSIZE)
lcd.drawNumber(28,21,consumption,MIDSIZE)
local xposCons=lcd.getLastPos()
lcd.drawText(xposCons,20,"m",SMLSIZE)
lcd.drawText(xposCons,26,"Ah",SMLSIZE)
lcd.drawNumber(57,21,watts,MIDSIZE)
lcd.drawText(lcd.getLastPos(),22,"W",0)
lcd.drawNumber(28,32,tension*10,MIDSIZE+PREC1)
lcd.drawText(lcd.getLastPos(),33,"V",0)
lcd.drawNumber(57,32,current*10,MIDSIZE+PREC1)
lcd.drawText(lcd.getLastPos(),33,"A",0)
vgauge(64,19,8,45,throttle,100,GREY_DEFAULT+FILL_WHITE,0,0)
lcd.drawText(65,11,"T%",SMLSIZE)
end
--Battery status
local function batstatus()
cell_nr = math.ceil(getValue(216) / 4.2)
cellv=(getValue(216)/ cell_nr)
cap_est=0
if cellv>=4.2 then cap_est=100
elseif cellv>=4.00 then cap_est=84
elseif cellv>=3.96 then cap_est=77
elseif cellv>=3.93 then cap_est=70
elseif cellv>=3.90 then cap_est=63
elseif cellv>=3.86 then cap_est=56
elseif cellv>=3.83 then cap_est=48
elseif cellv>=3.80 then cap_est=43
elseif cellv>=3.76 then cap_est=35
elseif cellv>=3.73 then cap_est=27
elseif cellv>=3.70 then cap_est=21
elseif cellv>=3.67 then cap_est=14
cap_est=0
end
return cellv, cell_nr, cap_est
end
--APM Armed and errors
local function armed_status()
local t2 = getValue(210)
apmarmed = t2%0x02;
if lastarmed~=apmarmed then
lastarmed=apmarmed
if apmarmed==1 then
model.setTimer(0,{ mode=1, start=0, value= SumFlight, countdownBeep=0, minuteBeep=1, persistent=1 })
model.setTimer(1,{ mode=1, start=0, value= FlightMode[FmodeNr].Timer, countdownBeep=0, minuteBeep=0, persistent=1 })
playFile("SOUNDS/en/SARM.wav")
playFile(FlightMode[FmodeNr].SoundActive1)
batstatus()
playNumber(cell_nr, 0, 0)
playFile("/SOUNDS/en/battc.wav")
playFile("/SOUNDS/en/att.wav")
playNumber(cap_est,8,0)
zerobattery=cap_est
zerocap=getValue(207)%100
else
SumFlight = model.getTimer(0).value
model.setTimer(0,{ mode=0, start=0, value= model.getTimer(0).value, countdownBeep=0, minuteBeep=1, persistent=1 })
FlightMode[FmodeNr].Timer=model.getTimer(1).value
model.setTimer(1,{ mode=0, start=0, value= FlightMode[FmodeNr].Timer, countdownBeep=0, minuteBeep=0, persistent=1 })
playFile("SOUNDS/en/SDISAR.wav")
end
end
t2 = (t2-apmarmed)/0x02;
status_severity = t2%0x10;
t2 = (t2-status_severity)/0x10;
status_textnr = t2%0x400;
if(status_severity > 0)
then
if status_severity ~= apm_status_message.severity or status_textnr ~= apm_status_message.textnr then
apm_status_message.severity = status_severity
apm_status_message.textnr = status_textnr
apm_status_message.timestamp = getTime()
end
end
if apm_status_message.timestamp > 0 and (apm_status_message.timestamp + 2*100) < getTime() then
apm_status_message.severity = 0
apm_status_message.textnr = 0
apm_status_message.timestamp = 0
end
end
--FlightModes
local function Flight_modes()
FmodeNr=getValue(208)+1
if FmodeNr<1 or FmodeNr>17 then
FmodeNr=13
end
if FmodeNr~=last_flight_mode then
playFile(FlightMode[FmodeNr].SoundActive1)
last_flight_mode_play=(100*FlightMode[FmodeNr].Repeat)+getTime()
if apmarmed==1 then
FlightMode[last_flight_mode].Timer=model.getTimer(1).value
model.setTimer(1,{ mode=1, start=0, value= FlightMode[FmodeNr].Timer, countdownBeep=0, minuteBeep=0, persistent=1 })
else
model.setTimer(1,{ mode=0, start=0, value= FlightMode[FmodeNr].Timer, countdownBeep=0, minuteBeep=0, persistent=1 })
end
last_flight_mode=FmodeNr
elseif getTime()>last_flight_mode_play
then
playFile(FlightMode[FmodeNr].SoundActive1)
last_flight_mode_play=(100*FlightMode[FmodeNr].Repeat)+getTime()
end
end
--Engaged Flight Mode
local function Flight_switches()
for i=1,6 do
if getValue(i+99)>0 then
SwitchPos=i+99
Engaged=Switches[i].FlightNumber
break
end
end
if SwitchPos~=LastSwitchPos then
playFile(FlightMode[Engaged].SoundEngaged1)
LastSwitchPos=SwitchPos
repeatplay=300+getTime()
SwitchFlag=5
elseif FmodeNr~=Engaged and repeatplay<getTime() and SwitchFlag>0 then
playFile("/SOUNDS/en/FSMM.wav")
SwitchFlag=SwitchFlag-1
repeatplay=SwitchFlag*200+getTime()
end
end
--Background
local function background()
armed_status()
Flight_modes()
Flight_switches()
end
--Display
local function run(event)
--lcd.lock()
lcd.clear()
armed_status()
Flight_modes()
Flight_switches()
toppanel()
powerpanel()
altpanel()
vspeedpanel()
rollpanel()
headingpanel()
pitchpanel()
speedpanel()
gpspanel()
end
return {run=run, background=background}Ik voel me alleen niet geroepen om voor iedereen lua scripting te maken. Naze en naza prima, die heb ik zelf toch nodig. De ander fc's ken ik niet, dus dat mag iemand anders doen.
Een verzameling staat hier al R/C Settings - Lua Scripts
Een verzameling staat hier al R/C Settings - Lua Scripts