Het is nog niet voor direct, misschien iets voor in de zomer. Dan heb ik meer tijd om te bouwen. 
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
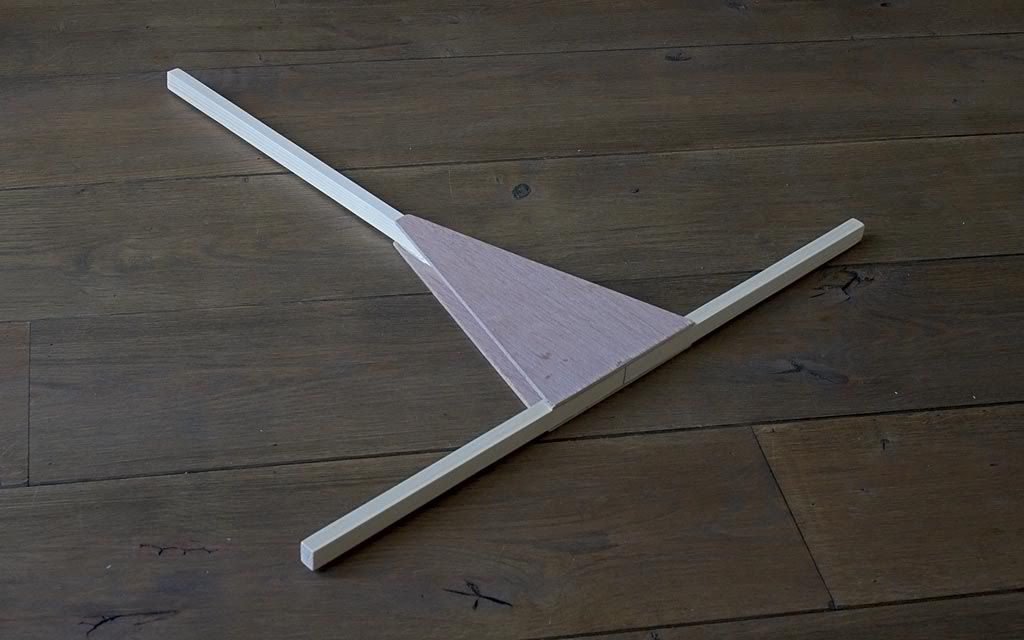
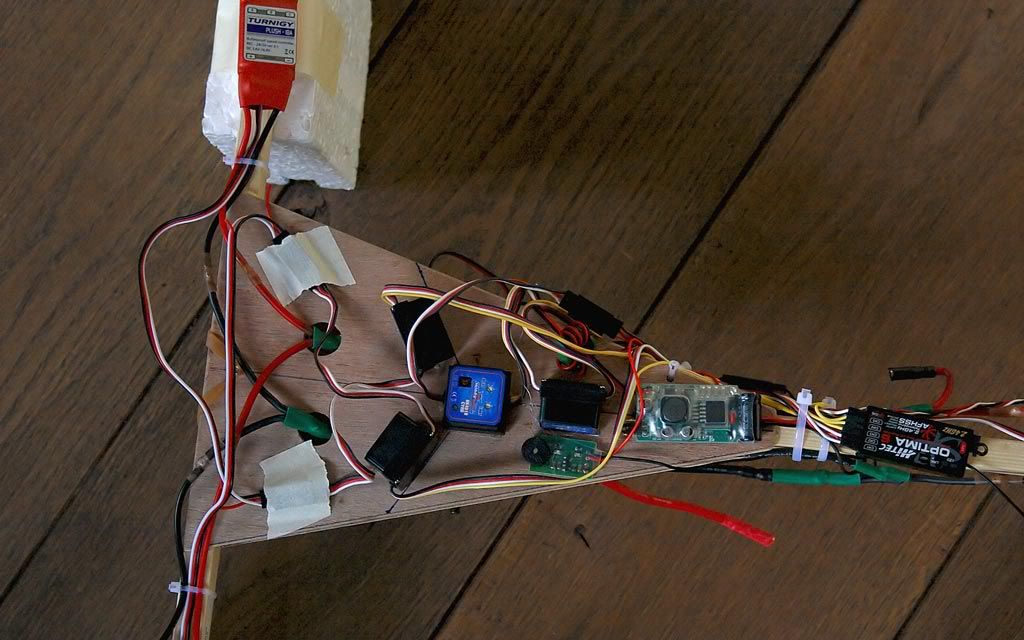
Zo langzamerhand ook maar eens beginnen met die van mij. Al met al verzamel je voor zo'n projectje heel wat electronica:
")



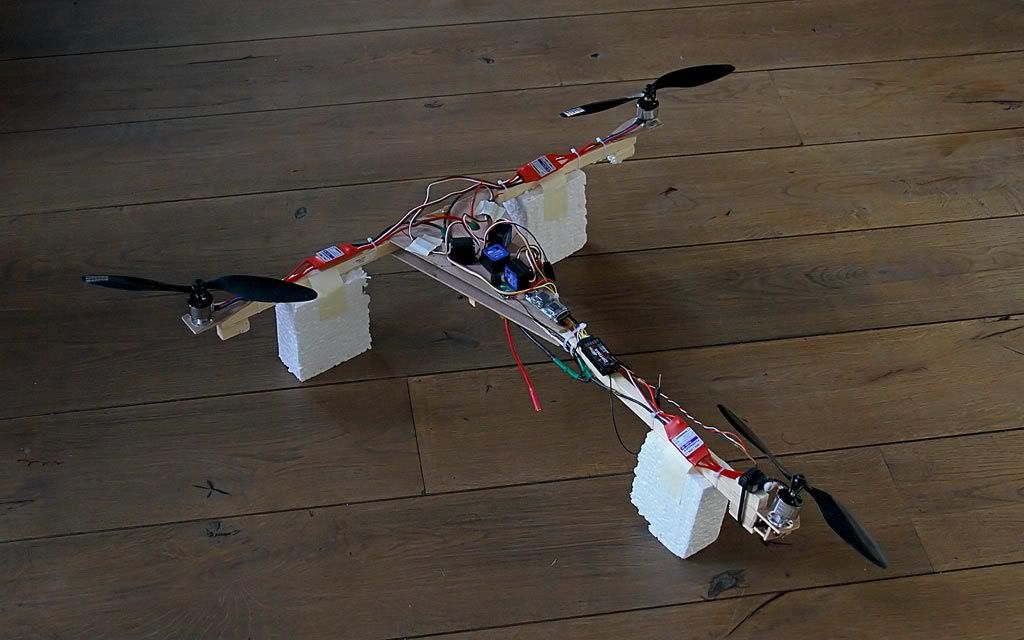
Na een paar avondjes hobbyen was ie klaar, het bouwen valt achteraf best mee.
Ook het eerste trimwerk zit erop, en dat val zeker niet mee
Prachtig!
Wat voor trimwerk heb je moeten verrichten?
 )
)



") maar mag ik vragen waarom je eigenlijk met losse gyro's bent gaan knutselen, ipv bijv een hk bordje? qua kosten lijkt het me goedkoper...
maar mag ik vragen waarom je eigenlijk met losse gyro's bent gaan knutselen, ipv bijv een hk bordje? qua kosten lijkt het me goedkoper...