hallo multicopter freaken 
ik ga hier proberen een bouwverslag te plaatsen van de Reptile Aphid 450
Reptile-aphid X450 Shaft Tyranids Rack FPV Multicopter - ?36.51
het mooie van dit frame is dat je genoeg plaats hebt voor het plaatsen van je setup
setup
Dji motoren 960kv
Naza M
Spektrum AR8000
Spektrum DX8
Esc 30A hobbypower
FPV cam Sony 600 tvl camera
5.8 immersion 600mw
wat verlichting
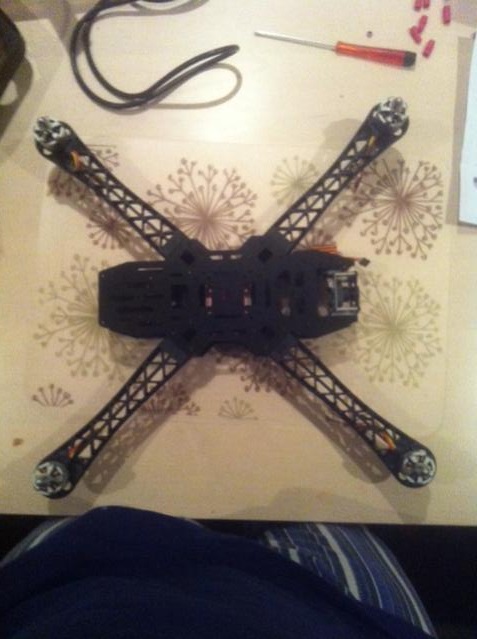
het frame word deels gemonteerd geleverd , deze even los halen en de schroefjes voor zien van een beetje locktide

monteer de Naza zo dicht mogelijk bij het zwaarte punt
onder de naza heb ik dubbelzijdige foam geplaats +/- 2 a 3mm dik voor de demping.


de zijkanten van de Naza heb ik afgeplakt met zwarte isolatie tape , je kan namelijk problemen krijgen als je dit niet doet (bijv met zonlicht) oftewel zonnestorm genoemd

de armpjes gemonteerd, met het frontstuk met de TL 600 sony FPV camera")

de motoren voorzien van 3,5mm bullet connectors deze netjes gesoldeerd en voorzien van krimp kous

let op dat je niet vergeet eerst het krimkousje te plaasten , de kabels van de motoren eerst even aan tinnen

de motoren op hun plaats gezet

kabels netjes door de armen weg gewerkt.

de top plate deze natuurlijk nog niet vast gezet

De FPV camera deze is voorzien van tilt functie d.m.v een servo (deze ga ik denk ik niet gebruiken)

er word een power distrbution board mee geleverd ben er nog niet uit of ik deze wel ga gebruiken , waarschijnlijk ook niet
de props gemonteerd , ik heb gekozen voor de Graupner E props

nu nog even wachten tot de ESC geleverd worden door de postbode
ik heb gekozen voor deze esc , als dit een goede keuze was moet nog blijken

gisteravond om 21.00uur gaat de voorbel , en wie staat daar voor de deur? yep de postbode (die maakte zeker overuren)
en wat kwam hij brengen ...juist mijn esc's dus weer verder met de bouw..
aan gezien ik niet echt een soldeer meester ben , heb ik de kabels voor de motoren maar ingekort i.p.v de bullit connector rechtstreeks op de esc' te solderen



vandaag weer verder met het solderen van de esc aan het distrbution bord (ja ik ga hem toch gebruiken)
NIET vergeten !!!voordat je deze gaat solderen wel even de esc's kalibreren d.m.v
de esc's allemaal even apart aan te sluiten op de ontvanger (in het throttle kanaal)
de esc aan sluiten op de motor.
de zender aan (gas op volgas)
De nu esc aansluiten op de lipo
nu hoor je een aantal piepjes
na 2 sec gas stick weer omlaag , nu hoor je wederom weer een aantal piepjes.
de esc is gekalibreerd
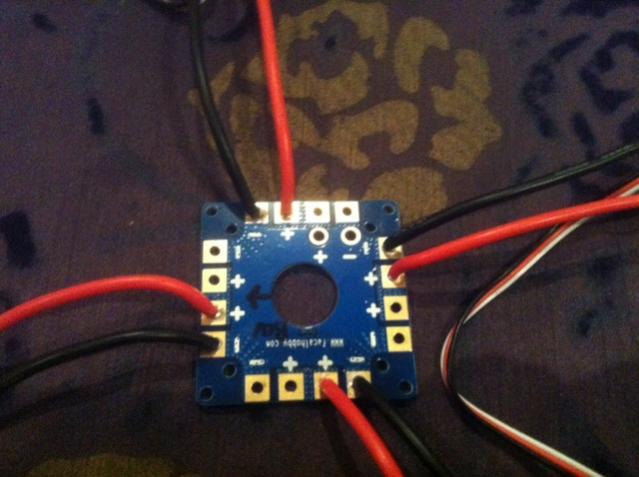
opletten natuurlijk dat je de + en - goed hebt , ik heb de esc zo gesoldeerd zodat de platte kant aan de onderkant van de armen komt te zitten , zo zitten ze net wat beter
, ik heb de esc zo gesoldeerd zodat de platte kant aan de onderkant van de armen komt te zitten , zo zitten ze net wat beter
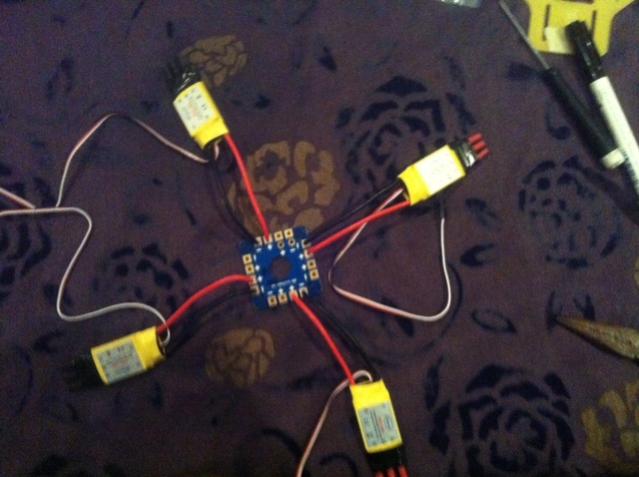
nu nog de leds erbij solderen , de voeding voor de video zender , en de voeding voor de PMU .
Voor de leds heb ik 6V nodig dus deze heb ik van de rode draad van de esc genomen (deze los halen bij connector) , de zwarte draad(van de leds) kun je gewoon op de - solderen van het bordje.
De rode draden even los halen bij de overige esc's en voor zien van een krimpkousje (los halen bij connector).
voor de ledstrip (ja ook die heb ik hahaha) heb je weer 12V nodig dus deze ook gewoon op het bordje gesoldeerd.
word nu wel een hele bos kabeltjes")

Het aan sluiten van de AR8000 op de Naza
de kabels aan sluiten:
de ail op de A van de Naza
de elev op de E van de Naza
de throttle op de T van de Naza
de rudder op de R van de Naza
de gear op de U van de Naza
aux 1 op de X1 van de Naza
aux 2 op de X2 van de Naza
de 4 aderige kabel van de PMU op de LED van de Naza
de 3 aderige kabel van de PMU op de X3 van de Naza



de motoren aan sluiten
de motor rechts boven is motor 1 , links boven motor 2 , links onder motor 3 , rechts onder motor 4
zie afbeelding hieronder
deze ook op deze volgorde aansluiten op de Naza
LET goed op dat de volgorde ook klopt motor 1 op M1 van Naza , motor 2 op M2 van de Naza enzv
klopt dit niet dan krijg je hele rare dingen bij het test vliegen


zo nu alles in elkaar zetten (rot klusje met al die kabels haha)
het eind resultaat


de onderzijde van de quad

de bouw is klaar
Nick
ik ga hier proberen een bouwverslag te plaatsen van de Reptile Aphid 450
Reptile-aphid X450 Shaft Tyranids Rack FPV Multicopter - ?36.51
het mooie van dit frame is dat je genoeg plaats hebt voor het plaatsen van je setup
setup
Dji motoren 960kv
Naza M
Spektrum AR8000
Spektrum DX8
Esc 30A hobbypower
FPV cam Sony 600 tvl camera
5.8 immersion 600mw
wat verlichting
het frame word deels gemonteerd geleverd , deze even los halen en de schroefjes voor zien van een beetje locktide
monteer de Naza zo dicht mogelijk bij het zwaarte punt
onder de naza heb ik dubbelzijdige foam geplaats +/- 2 a 3mm dik voor de demping.
de zijkanten van de Naza heb ik afgeplakt met zwarte isolatie tape , je kan namelijk problemen krijgen als je dit niet doet (bijv met zonlicht) oftewel zonnestorm genoemd
de armpjes gemonteerd, met het frontstuk met de TL 600 sony FPV camera
de motoren voorzien van 3,5mm bullet connectors deze netjes gesoldeerd en voorzien van krimp kous
let op dat je niet vergeet eerst het krimkousje te plaasten , de kabels van de motoren eerst even aan tinnen
de motoren op hun plaats gezet
kabels netjes door de armen weg gewerkt.
de top plate deze natuurlijk nog niet vast gezet
De FPV camera deze is voorzien van tilt functie d.m.v een servo (deze ga ik denk ik niet gebruiken)
er word een power distrbution board mee geleverd ben er nog niet uit of ik deze wel ga gebruiken , waarschijnlijk ook niet
de props gemonteerd , ik heb gekozen voor de Graupner E props
nu nog even wachten tot de ESC geleverd worden door de postbode
ik heb gekozen voor deze esc , als dit een goede keuze was moet nog blijken
gisteravond om 21.00uur gaat de voorbel , en wie staat daar voor de deur? yep de postbode (die maakte zeker overuren)
en wat kwam hij brengen ...juist mijn esc's dus weer verder met de bouw..
aan gezien ik niet echt een soldeer meester ben , heb ik de kabels voor de motoren maar ingekort i.p.v de bullit connector rechtstreeks op de esc' te solderen
vandaag weer verder met het solderen van de esc aan het distrbution bord (ja ik ga hem toch gebruiken
)NIET vergeten !!!voordat je deze gaat solderen wel even de esc's kalibreren d.m.v
de esc's allemaal even apart aan te sluiten op de ontvanger (in het throttle kanaal)
de esc aan sluiten op de motor.
de zender aan (gas op volgas)
De nu esc aansluiten op de lipo
nu hoor je een aantal piepjes
na 2 sec gas stick weer omlaag , nu hoor je wederom weer een aantal piepjes.
de esc is gekalibreerd
opletten natuurlijk dat je de + en - goed hebt
, ik heb de esc zo gesoldeerd zodat de platte kant aan de onderkant van de armen komt te zitten , zo zitten ze net wat beter
nu nog de leds erbij solderen , de voeding voor de video zender , en de voeding voor de PMU .
Voor de leds heb ik 6V nodig dus deze heb ik van de rode draad van de esc genomen (deze los halen bij connector) , de zwarte draad(van de leds) kun je gewoon op de - solderen van het bordje.
De rode draden even los halen bij de overige esc's en voor zien van een krimpkousje (los halen bij connector).
voor de ledstrip (ja ook die heb ik hahaha
) heb je weer 12V nodig dus deze ook gewoon op het bordje gesoldeerd.word nu wel een hele bos kabeltjes
Het aan sluiten van de AR8000 op de Naza
de kabels aan sluiten:
de ail op de A van de Naza
de elev op de E van de Naza
de throttle op de T van de Naza
de rudder op de R van de Naza
de gear op de U van de Naza
aux 1 op de X1 van de Naza
aux 2 op de X2 van de Naza
de 4 aderige kabel van de PMU op de LED van de Naza
de 3 aderige kabel van de PMU op de X3 van de Naza
de motoren aan sluiten
de motor rechts boven is motor 1 , links boven motor 2 , links onder motor 3 , rechts onder motor 4
zie afbeelding hieronder
deze ook op deze volgorde aansluiten op de Naza
LET goed op dat de volgorde ook klopt motor 1 op M1 van Naza , motor 2 op M2 van de Naza enzv
klopt dit niet dan krijg je hele rare dingen bij het test vliegen
zo nu alles in elkaar zetten (rot klusje met al die kabels haha)
het eind resultaat
de onderzijde van de quad
de bouw is klaar
Nick
Laatst bewerkt door een moderator: