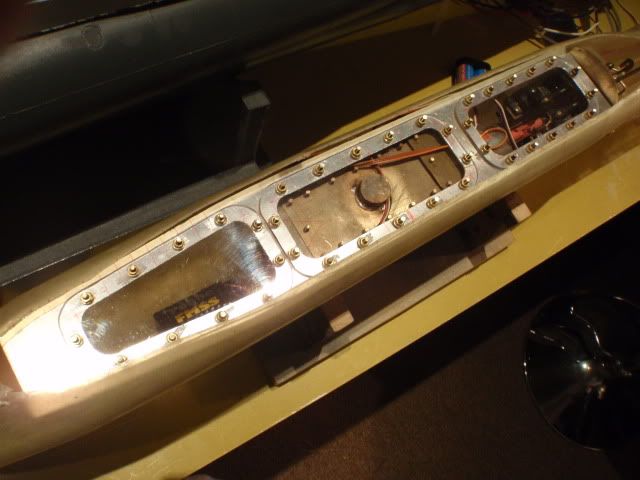
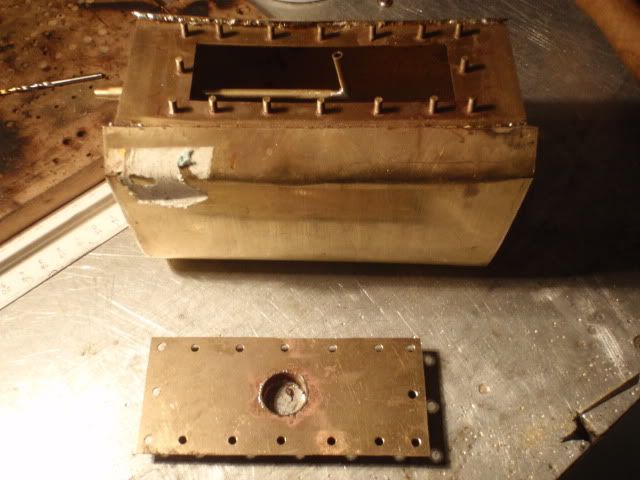
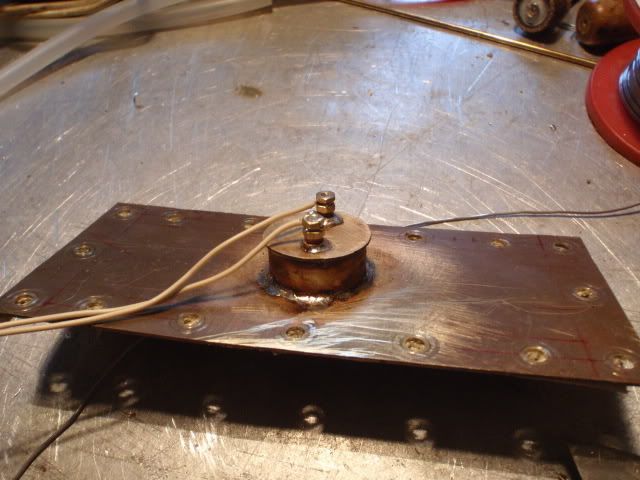
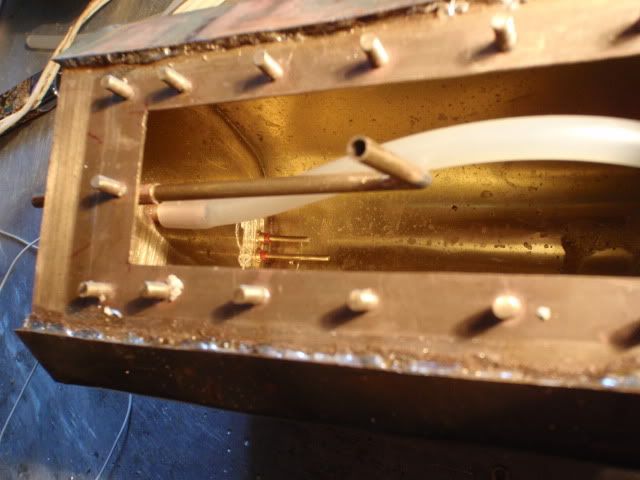
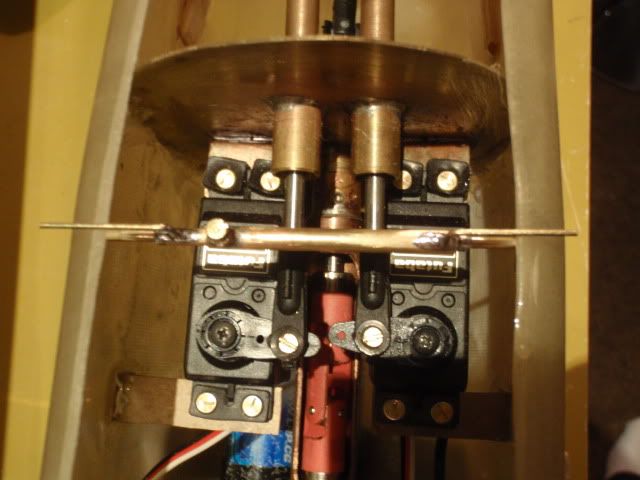
De doorvoeren op het schot gesoldeerd, meteen de stangen gemaakt voor de bediening van het richtingsroer en duikroer.
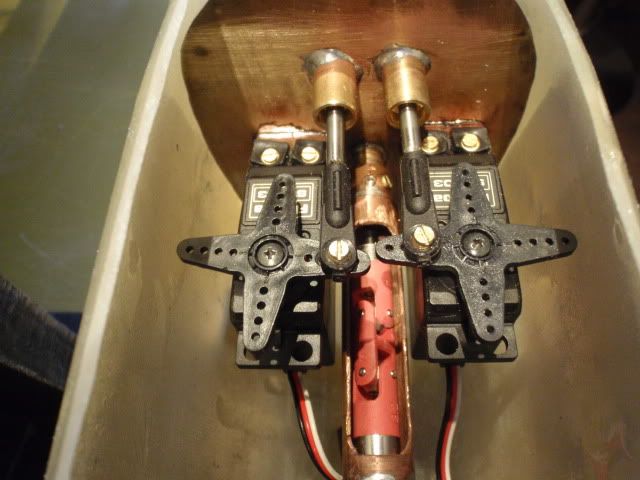
Ook de servo's geplaatst met de eerste set steunen op het schot gesoldeerd, alles vastgezet met M2 schroeven.
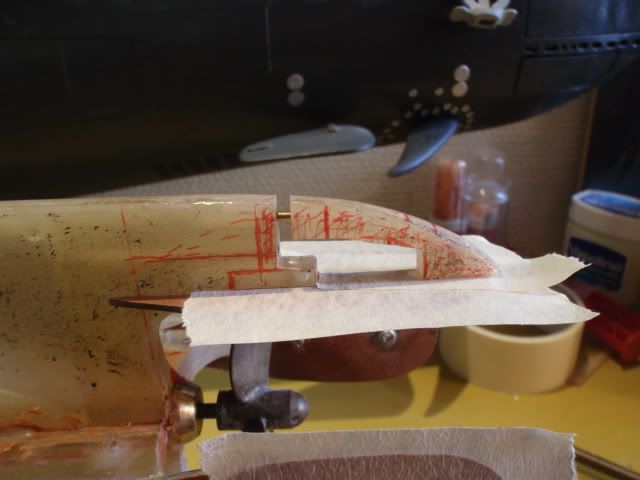
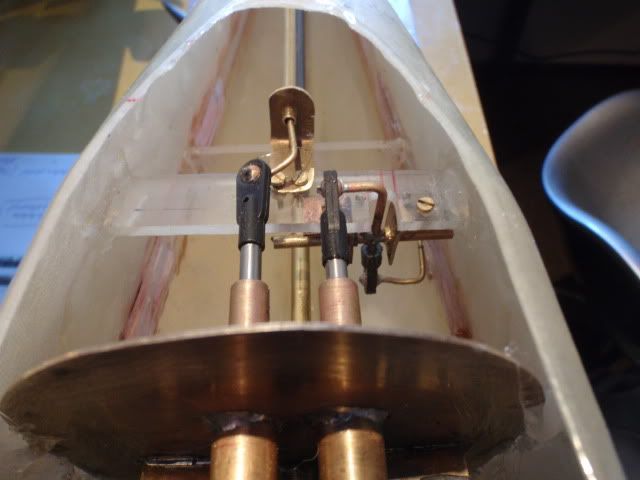
De eerste stap in het koppelen van de stangen, richtingsroer was eenvoudig, het duikroergedeelte zit een behoorlijk stuk lager in de boot, dus daar moest ik wat anders op verzinnen.
De eerste poging met deze constructie mislukte omdat het teveel kracht kostte om het duikroer te kunnen bewegen, terug naar het tekenbord voor een nieuwe poging.
De tweede poging lukte beter, het is uiteindelijk een soort hevelconstructie geworden die soepel loopt.
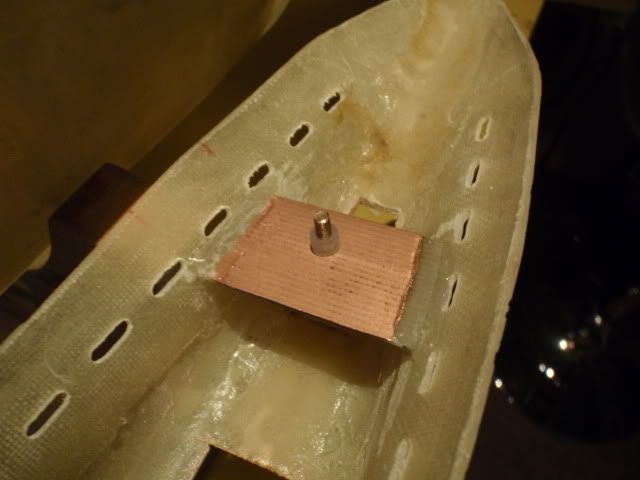
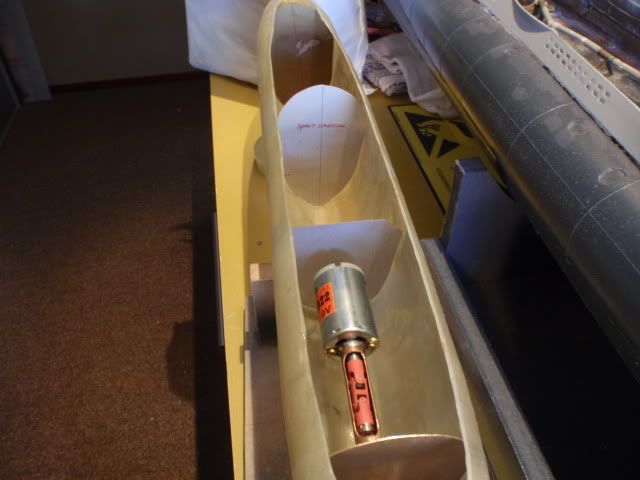
Een ander punt wat nog gedaan moest worden was het maken van de achterste steunen voor de servo's en de motor.
Ook heb ik het accu pakket aangeschaft, 12 V 5 Ah, verdeelt over 6 cellen voor de tank en 4 cellen achter de tank onder de motor.
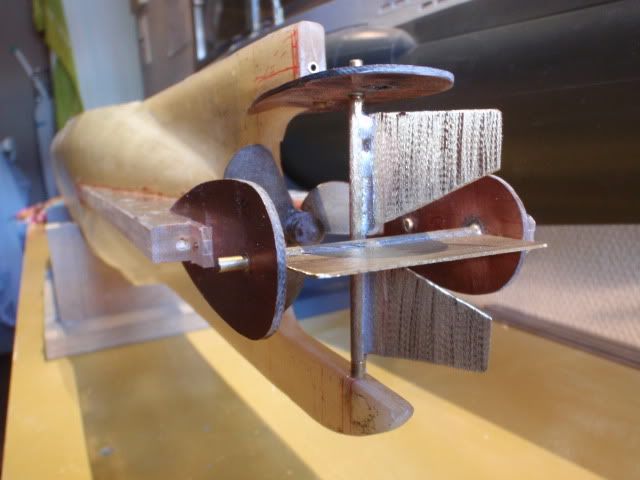
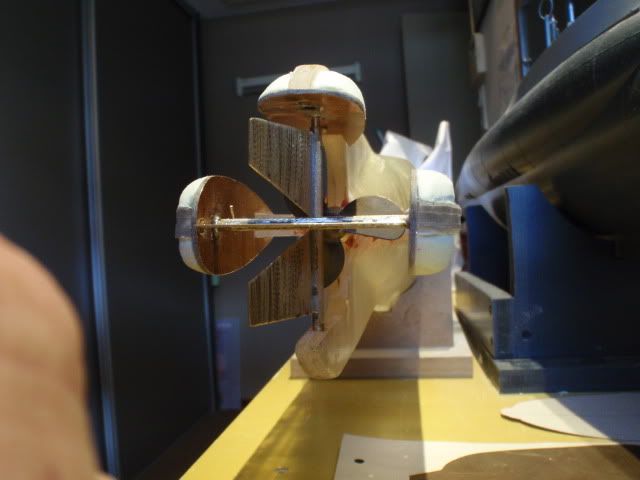
Ook een constructie gemaakt voor het plaatsen van de stabilisators voor onderwatervaart, weet nog niet zeker of ik degene voor de dwarsrichting ook ga gebruiken.
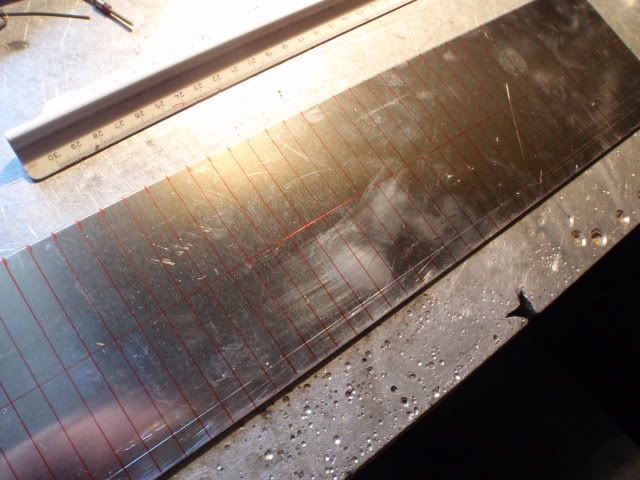
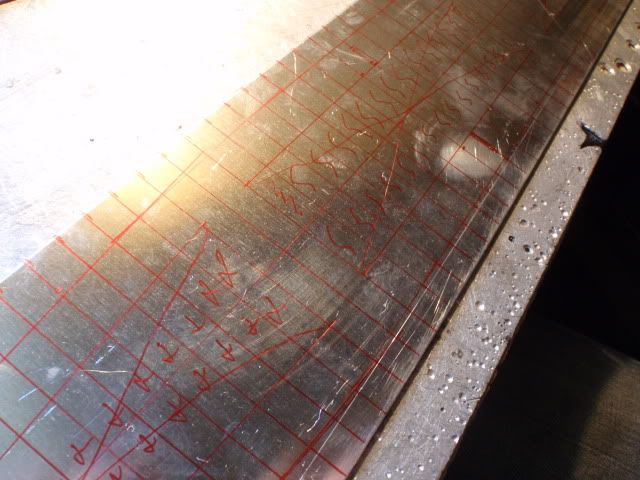
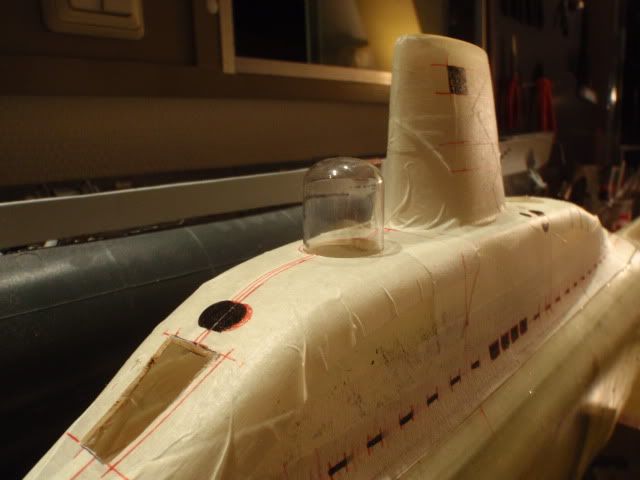
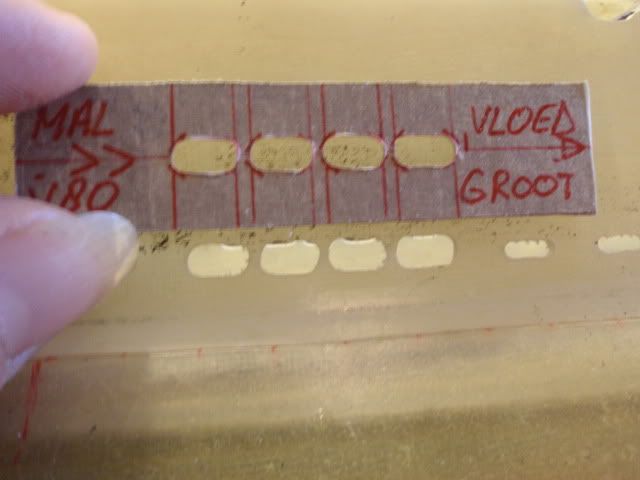
Intussen ben ik druk met het waterdichte dek, daarvoor heb ik dit instrumentje gemaakt, hiermee kan ik de breedte meten op de hoogte waar het dek moet komen.
En zo werkt het dan, ophangen op de haakjes, dan het geheel uitschuifen en zekeren met het schroefje, enige nadeel hieraan is, dat je de romp over het geheel moet markeren, pas dan kan ik de maten regelmatig overzetten op de aluminium plaat die het dek moet worden.






























") handig.
handig.