Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Nieuw : NAZA Gps upgrade (f450 loiter in harde wind filmpjes! post #413)
- Topicstarter Digitech
- Startdatum
Psygho (Emil)
Forum veteraan
Klopt...
Chow
Forum veteraan
Denk dat het het beste is als ik een keer een gopro kan testen. Mocht dat goed gaan is aanschaf eventueel een optie een keer. Maar ongetest zie ik dat even niet zitten. Ik til dit experiment wel over de vakantie heen. Nu eerst maar lekker vliegen op de schaarse vliegdagen die er zijn ")
Wat mij nog altijd iriteerd is de manier van cutoff van de Naza
Als ik snel wil dalen ben ik toch altijd bang dat ik onder de 10% throttle kom en mijn motor's uitgaan
ik heb daar de volgende oplossing voor met de Graupner mx-16
Het gaat om Mix2, Mix1 is voor mijn failesave
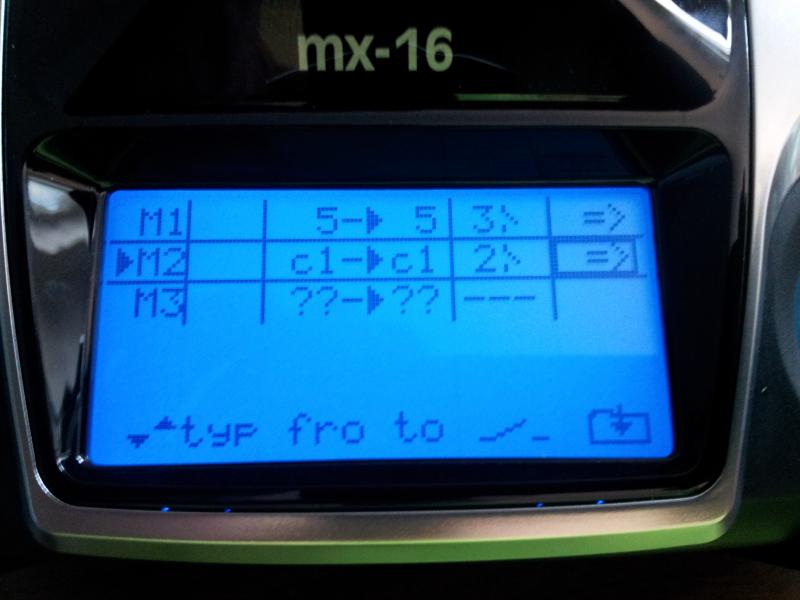
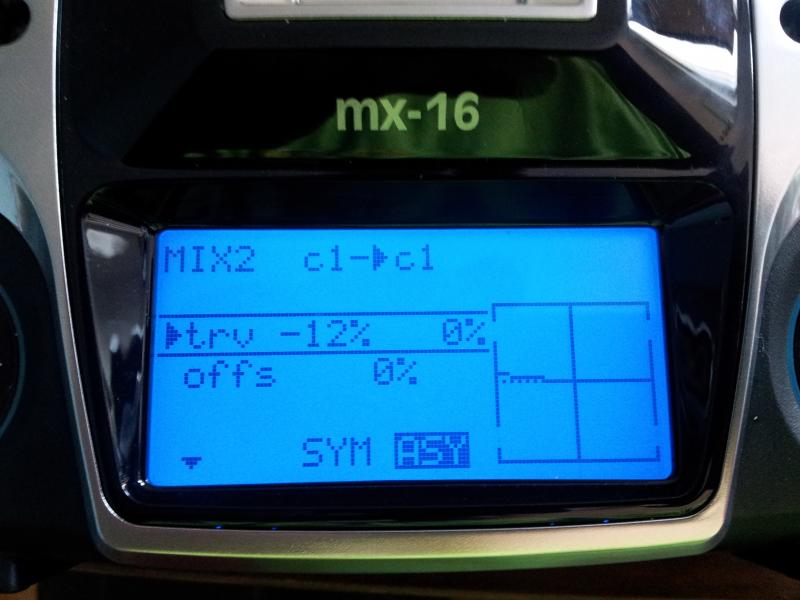
Hier nog even een joutroep om het duidelijk te maken
Bij mij werkt het perfect. Zodra je vliegt, schakelaar om. Vlak voor het landen schakelaar terug en je kan gewoon je motor's uit zetten.
Groet Daan
Als ik snel wil dalen ben ik toch altijd bang dat ik onder de 10% throttle kom en mijn motor's uitgaan
ik heb daar de volgende oplossing voor met de Graupner mx-16
Het gaat om Mix2, Mix1 is voor mijn failesave
Hier nog even een joutroep om het duidelijk te maken
Bij mij werkt het perfect. Zodra je vliegt, schakelaar om. Vlak voor het landen schakelaar terug en je kan gewoon je motor's uit zetten.
Groet Daan
Laatst bewerkt door een moderator:
dat kan nu eenmaal niet anders.....
het is niet het licht wat voor het verschil zorgt, maar de temperatuur.
het zonlicht verwarmt de lucht en de baro. en warme lucht heeft nu eenmaal een andere druk/dichtheid.
de meeste baro sensoren hebben een temperatuur meter ingebouwd om grote fluctuaties op te kunnen vangen, maar direct zonlicht verwarmt de lucht sneller dan de temp. sensor meet.
Lees eens hier: http://www.mikrokopter.de/ucwiki/Höhensensor?action=show&redirect=LuftdruckSensor
Niet enkel temperatuur maar vooral licht speelt een rol, je kan het bij een MK zelf makkelijk testen met een zaklamp en die geeft geen hitte.
Trouwens zo snel koelt of warmt het doosje niet af of op. Ik vloog van zon in schaduw en direct steeg hij 2 m.
Wat mij nog altijd iriteerd is de manier van cutoff van de Naza
Als ik snel wil dalen ben ik toch altijd bang dat ik onder de 10% throttle kom en mijn motor's uitgaan
ik heb daar de volgende oplossing voor met de Graupner mx-16
Het gaat om Mix2, Mix1 is voor mijn failesave
Hier nog even een joutroep om het duidelijk te maken
Bij mij werkt het perfect. Zodra je vliegt, schakelaar om. Vlak voor het landen schakelaar terug en je kan gewoon je motor's uit zetten.
Groet Daan
Handig
") misschien ook maar eens overwegen.
misschien ook maar eens overwegen.Mix 1 is voor je fail-safe geef je aan, heb je daar ook een foto van (van de instellingen)?
Laatst bewerkt door een moderator:
Psygho (Emil)
Forum veteraan
+1waarom zo moeilijik? als je je cut of type op intelligent ipv imediatly zet is het opgelost...
Dacht ik ook meteen aan....
Handig misschien ook maar eens overwegen.
Mix 1 is voor je fail-safe geef je aan, heb je daar ook een foto van (van de instellingen)?
Die instelling is gebaseerd op deze post
[153708] nieuwe-flightboard-dji-naza-80
Ik heb het alleen ietsjes anders gedaan, zal morgen mijn instellingen posten
waarom zo moeilijik? als je je cut of type op intelligent ipv imediatly zet is het opgelost...
Hoe stop je de motor's dan in manuel mode? want dat is mij niet helemaal duidelijk.
Ik heb op dit forum meer gelezen dat sommige het niet handig vonden dat de motoren stoppen onder de 10%, vandaar dat ik naar een oplossing gezocht heb.
Zo moeilijk is het niet, ff èèn mixje maken

Overigens vandaag maiden gedaan met mijn Naza + gps. Sjonge wat hangt dat ding stil zeg met PH. Heb nog geneens de gains afgesteld die staan nog standaard
Groet Daan
Laatst bewerkt door een moderator:
Ah leuk. Ben erg benieuwd.
2, eigenlijk 3 accu's gevlogen.
Setup was:
- DJI F550 met DJI electronica
- Naza met gps
- Aeroxcraft landing gear (geen gimbal)
- GoPro Hero2 'hard mounted' aan de landing gear
- 9x5 Graupner E-props.
Eerst geprobeerd met een 3s 3000 accu. Kwam van de grond, maar je zag dat hij het moeilijk had. Landen dus en vervolgens kwam hij niet meer van de grond af. Zelfs met volgas.
Vsen aan de laptop, even instellen op 4s en een 4s 5000 accu erin. De power was plenty en heerlijk gevlogen. Nog steeds wel last van een klein beetje auto yaw, maar ik ga binnenkort maar de motor opsturen en omwisselen! Uiteindelijk een aardig stukje gevlogen en de RTH nog eens getest. Net thuis en dus direct kijken en het resultaat valt me reuze mee. Ik heb onderstaande video niet bewerkt of verscherpt, louter wat beelden eruit gesneden en vervolgens hup op Youtube.
@Chow; ben erg benieuwd wat jou 550 doet met een GoPro eronder!!
Wel viel me de vliegtijd nog tegen.... na een minuut of 8 ging de rode led voor het eerst branden voor de 1e lipo warning. Vrij snel geland en gemeten; nog 34% sap over. Voor een 5000 accu voelt het best kort. Aan de andere kant zit er nogal wat gewicht onder natuurlijk. Zal hem eens vliegklaar wegen...
Laatst bewerkt door een moderator:
Vanavond heb ik mijn Quad getest met GPS. Nu de settings op -15 grzet zoals eerder gepost. Alles werkt perfect. Return to Home ging ook super. Best eng om dat voor de eerste keer te doen. Quad werkt nu goed. Blijft alleen nog wat zoeken op de YAW. Misschien door de maat van de prop. Ik draai 4S 750KV met een 11X5 graupner E-prop. Heb wel eens gelezen dat de 10X5 beter is. Hij kan dan niet meer mid-stick hoveren in manual mode. Dat wil ik wel voor het geval je een keer terug schakelt. Bij en te kleine prop valt hij bij het omschakelen van ATT-hold naar manual naar beneden.
Wil je niet hebben.
Nu de Gimball fine tunen.
Ben in ieder geval erg blij met dit systeem
Gr. Jasper
Wil je niet hebben.
Nu de Gimball fine tunen.
Ben in ieder geval erg blij met dit systeem
Gr. Jasper
Rogier, mooi helder filmpje zonder gekke beelden erin