Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Graupner's 2,4Ghz HOTT systeem
- Topicstarter prop-er
- Startdatum
Ja, de andere modellen, 5 stuks, werken allen prima met diezelfde software versie.
Bovendien werkt een andere ontvanger, uit een al jaren prima vliegend model in het "probleemvliegtuig" ook niet meer...... zelfde storing.
Andere servo`s er in zetten en kijken wat er gebeurt is natuurlijk een optie, alleen weet je dan nog niet echt of hij nu werkt omdat hij opnieuw opgestart is of omdat het andere servo`s zijn.
Maar is het mogelijk dat een servo die niet stuk is niet werkt omdat de combinatie met de ontvanger niet klopt?
Een ander geheugen heb ik ook al geprobeerd, geen resultaat.
Grtz,
Jan
Bovendien werkt een andere ontvanger, uit een al jaren prima vliegend model in het "probleemvliegtuig" ook niet meer...... zelfde storing.
Andere servo`s er in zetten en kijken wat er gebeurt is natuurlijk een optie, alleen weet je dan nog niet echt of hij nu werkt omdat hij opnieuw opgestart is of omdat het andere servo`s zijn.
Maar is het mogelijk dat een servo die niet stuk is niet werkt omdat de combinatie met de ontvanger niet klopt?
Een ander geheugen heb ik ook al geprobeerd, geen resultaat.
Grtz,
Jan
Het wordt steeds gekker.... ik heb de servo`s aangesloten met een Y kabeltje en daarbij een andere servo, dus 2 servo`s op 1 kanaal.
De andere servo doet het dan goed en de probleem servo doet niets.
Maar ...als ik de 2 probleemservo`s op de ontvanger aansluit met verder niets erbij werken ze goed!
Wie weet wat wijsheid is in dit geval?
Grtz,
Jan
De andere servo doet het dan goed en de probleem servo doet niets.
Maar ...als ik de 2 probleemservo`s op de ontvanger aansluit met verder niets erbij werken ze goed!
Wie weet wat wijsheid is in dit geval?
Grtz,
Jan
PH_AJH
Forum veteraan
Wie weet wat wijsheid is in dit geval?
Vast een flauw antwoord maar ik zou geen goedkope HK servo's gebruiken.
Het is een digitale servo, ik weet niet of je ze in combinatie met analoge gebruikt? De handleiding van je zender/ontvanger zegt daar namelijk wel wat over. Is een instelling die je op 10ms of op 20ms kunt zetten maar ik weet niet meer waar dat op sloeg.
Volgens mij is 10 ms analoge 20 ms digitaal, ik gebruik ze ook door elkaar in de miss wind hs 65 en 3152 robbe moet geen probleem geven.
Heb wel met de gr16 een probleem gehad dat kanaal 3 en 4 de servo's in de hoek gaan staan na op nieuw aansluiten probleem weg ?
Laatste keer dit in een vlucht gehad einde kist ,ontvanger is op gestuurd en
getest niks gevonden .
Dit was in een dogfighter met drie maal de hs 65
Heb wel met de gr16 een probleem gehad dat kanaal 3 en 4 de servo's in de hoek gaan staan na op nieuw aansluiten probleem weg ?
Laatste keer dit in een vlucht gehad einde kist ,ontvanger is op gestuurd en
getest niks gevonden .
Dit was in een dogfighter met drie maal de hs 65
Vast een flauw antwoord maar ik zou geen goedkope HK servo's gebruiken.
Het is een digitale servo, ik weet niet of je ze in combinatie met analoge gebruikt? De handleiding van je zender/ontvanger zegt daar namelijk wel wat over. Is een instelling die je op 10ms of op 20ms kunt zetten maar ik weet niet meer waar dat op sloeg.
Arjan, ik gebruik ze inderdaad samen met analoge servo`s (op ailerons) .
Ik ga kijken of ik terug kan vinden wat jij bedoelt, zou de oplossing kunnen zijn.
Grtz,
Jan
PH_AJH
Forum veteraan
Is het niet net andersom, die 10ms voor digitaal en 20ms voor analoog....? En waar zet je hem dan op bij gemengd gebruik? Ik weet dat analoge servo's kapot kunnen gaan als je ze op de "digitale stand" aanstuurt.Volgens mij is 10 ms analoge 20 ms digitaal, ik gebruik ze ook door elkaar in de miss wind hs 65 en 3152 robbe moet geen probleem geven.
-edit- ja ik weet het wel zeker: "repetition time of 10 ms (only digital servos!)"
Bij analoge servo's gebruik je 20 ms en bij digitale 10 ms. Niet andersom! Analoge servo's worden ook warm en gaan stuk als je de framerate op 10 ms instelt.
Algasy, wat gebruik je aan voedingsspanning op de ontvanger? Je hebt veel kans, dat deze servo's geen genoegen nemen met de hoogte van de puls, die de ontvanger levert ten opzichte van de voedingsspanning. Op een wat lagere spanning functioneren ze dan wél normaal. Dit houdt dan wél in, dat deze servo's eigenlijk ongeschikt zijn voor de meeste merken ontvangers en/of alleen op 4,8 Volt kunnen werken in combinatie met deze ontvangers.
De HoTT ontvangers leveren pulsen met een hoogte van 3,2 Volt toptop, net zoals de meeste andere merken. Normaal gesproken hebben servo's een ingangsbuffer of een elektronica, die genoegen neemt met een pulshoogte van minder dan 3 Volt toptop, waarbij het niet uitmaakt hoe hoog de voedingsspanning is.
Er bestaat echter ook veel elektronica, die is opgebouwd met cmos technologie (CMOS - Wikipedia) en dat kent een zogenaamd onzekerheidsgebied. Hierbij wordt 1/3 van de voedingsspanning gezien als een logische 0. Tussen 1/3 en 2/3 van de voedingsspanning is er een onzekerheidsgebied. Vanaf 2/3 van de voedingsspanning wordt gezien als een logische 1. Bij een voedingsspanning van 6 Volt is dan 0 tot 2 Volt een logische 0, tussen 2 en 4 Volt is onzeker en tussen 4 en 6 Volt is een logische 1. Als de hoogte van de pulsen tot in het onzekerheidsgebied reiken heb je mazzel als ze als een 1 worden gezien, bij pech worden ze als een 0 gezien en gebeurt er dus niets.
[edit]Bij het aansluiten van twee servo's op een Y-kabel is de belasting op pulsuitgang van de ontvanger iets hoger en komt de puls net iets minder hoog. Hierdoor treedt het probleem eerder op.[/edit]
Algasy, wat gebruik je aan voedingsspanning op de ontvanger? Je hebt veel kans, dat deze servo's geen genoegen nemen met de hoogte van de puls, die de ontvanger levert ten opzichte van de voedingsspanning. Op een wat lagere spanning functioneren ze dan wél normaal. Dit houdt dan wél in, dat deze servo's eigenlijk ongeschikt zijn voor de meeste merken ontvangers en/of alleen op 4,8 Volt kunnen werken in combinatie met deze ontvangers.
De HoTT ontvangers leveren pulsen met een hoogte van 3,2 Volt toptop, net zoals de meeste andere merken. Normaal gesproken hebben servo's een ingangsbuffer of een elektronica, die genoegen neemt met een pulshoogte van minder dan 3 Volt toptop, waarbij het niet uitmaakt hoe hoog de voedingsspanning is.
Er bestaat echter ook veel elektronica, die is opgebouwd met cmos technologie (CMOS - Wikipedia) en dat kent een zogenaamd onzekerheidsgebied. Hierbij wordt 1/3 van de voedingsspanning gezien als een logische 0. Tussen 1/3 en 2/3 van de voedingsspanning is er een onzekerheidsgebied. Vanaf 2/3 van de voedingsspanning wordt gezien als een logische 1. Bij een voedingsspanning van 6 Volt is dan 0 tot 2 Volt een logische 0, tussen 2 en 4 Volt is onzeker en tussen 4 en 6 Volt is een logische 1. Als de hoogte van de pulsen tot in het onzekerheidsgebied reiken heb je mazzel als ze als een 1 worden gezien, bij pech worden ze als een 0 gezien en gebeurt er dus niets.
[edit]Bij het aansluiten van twee servo's op een Y-kabel is de belasting op pulsuitgang van de ontvanger iets hoger en komt de puls net iets minder hoog. Hierdoor treedt het probleem eerder op.[/edit]
Dus als ik het goed begrijp kunnen eigenlijk digitale en analoge servo`s niet samen? de een moet 10 ms en de ander 20 ms ingesteld zijn, en je kunt uiteraard maar voor 1 kiezen.
Het staat bij mij op 20 ms.
Ook voor rudder en elevator maar analoge servo`s kopen dus?
Edit: Ik heb nu alles uit het vliegtuig gehaald en los op tafel werkt alles perfect ..... ik weet het niet meer.
Grtz,
Jan
Het staat bij mij op 20 ms.
Ook voor rudder en elevator maar analoge servo`s kopen dus?
Edit: Ik heb nu alles uit het vliegtuig gehaald en los op tafel werkt alles perfect ..... ik weet het niet meer.
Grtz,
Jan
Laatst bewerkt:
Neenee, op een frametijd van 20 ms werken zowel analoge als digitale servo's prima. De elektronica van analoge servo's is hierop berekend, bij digitale servo's maakt het niet uit.
Bij een kortere frametijd dan 20 ms worden digitale servo's wat nauwkeuriger en sneller, maar voor recreatief gebruik merk je hier eigenlijk niet echt wat van. In analoge servo's bevat de elektronica een zogenaamd puls verlengings netwerk, dat in de war raakt als de frametijd veel afwijkt van 20 ms.
Bij een kortere frametijd dan 20 ms worden digitale servo's wat nauwkeuriger en sneller, maar voor recreatief gebruik merk je hier eigenlijk niet echt wat van. In analoge servo's bevat de elektronica een zogenaamd puls verlengings netwerk, dat in de war raakt als de frametijd veel afwijkt van 20 ms.
Kan iemand mij vertellen of ik de Hott GPS module kan gebruiken om een toestel wat b.v. in een maisveld is gevallen te lokaliseren en weer terug op te sporen?
kan ik dan met de zender waar de telemetrie dat zichtbaar is dmv richting en afstand naar het toestel lopen.
kan ik dan met de zender waar de telemetrie dat zichtbaar is dmv richting en afstand naar het toestel lopen.
PH_AJH
Forum veteraan
Nee, niet zoals jij het vraagt. Meestal zul je als het toestel op de grond ligt geen ontvangst meer hebben. De GPS geeft je wel een afstand en de bewegingsrichting van het toestel als het vliegt maar daar heb je niks aan om hem terug te vinden. Je kunt wel de exacte coördinaten zien waar de GPS zich bevindt maar niet als je geen ontvangst meer hebt.
Wat wel kan is (als je de vlucht gelogd hebt) op Google Earth de vlucht bekijken en kijken waar het lijntje ophoudt.
Wat wel kan is (als je de vlucht gelogd hebt) op Google Earth de vlucht bekijken en kijken waar het lijntje ophoudt.
Oke, dan moet je dus elke vlucht loggen. Is de SD kaart dan zo vol of valt dat mee. Kun je binnen een straal van laten we zeggen 10 meter nauwkeurig bepalen waar hij neergekomen is.
PH_AJH
Forum veteraan
Dat valt wel mee. Een logfile van de GPS is ongeveer 25Mb per uur. Als je een 4Gb kaartje hebt kun je heel wat uren loggen. In een dag of een maand krijg je het echt niet vol. Maar je kunt je logjes natuurlijk ook gewoon af en toe wissen, is een minuut werk.
Voor de nauwkeurigheid; dit is een start en landing. Binnen een straal van 10 meter is zonder twijfel mogelijk.
Moet er wel bij zeggen, als je buiten bereik van de telemetrie vliegt (wat het geval kan zijn als je heel ver weg bent en laag) werkt dat natuurlijk niet en ook niet als je stroom uitvalt.
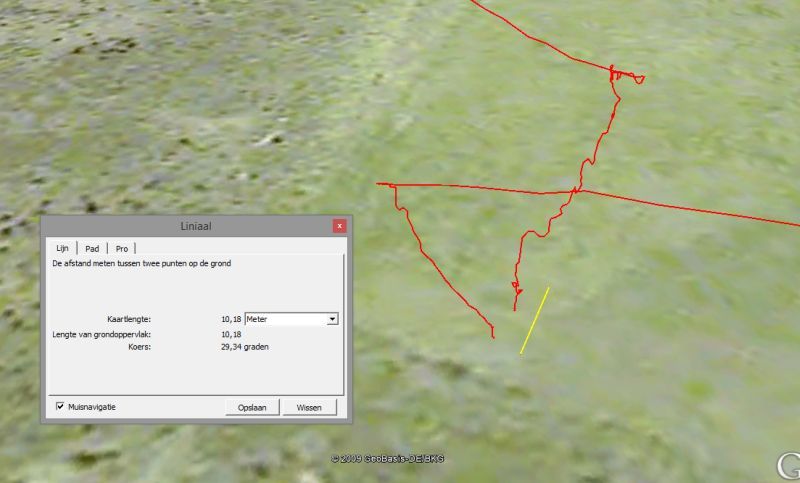
Je ziet hier precies waar ik hem heb aangezet, naar links ben gelopen en de kist aan de rand van het veld heb gelegd en vervolgens gestart. Na de landing zie je waar k terug ben gelopen (vanaf de bovenkant van het plaatje) en de kist bij mijn spullen weer uit heb gezet. Klopt helemaal.
In ieder geval heb je met een GPS-log heel wat meer KANS dat je het toestel terug vindt dan zonder.
Voor de nauwkeurigheid; dit is een start en landing. Binnen een straal van 10 meter is zonder twijfel mogelijk.
Moet er wel bij zeggen, als je buiten bereik van de telemetrie vliegt (wat het geval kan zijn als je heel ver weg bent en laag) werkt dat natuurlijk niet en ook niet als je stroom uitvalt.
Je ziet hier precies waar ik hem heb aangezet, naar links ben gelopen en de kist aan de rand van het veld heb gelegd en vervolgens gestart. Na de landing zie je waar k terug ben gelopen (vanaf de bovenkant van het plaatje) en de kist bij mijn spullen weer uit heb gezet. Klopt helemaal.
In ieder geval heb je met een GPS-log heel wat meer KANS dat je het toestel terug vindt dan zonder.
dank voor de info 
ik ga er mee aan de slag
ik ga er mee aan de slag
Hoi Bart,
De HF moet juist aan, de zender moet zenden.
Weet iemand waarom het telemetrie symbool gaat knipperen en de zender gaat piepen?
Ik heb helemaal geen telemetrie geinstalleerd.
De HF moet juist aan, de zender moet zenden.
Weet iemand waarom het telemetrie symbool gaat knipperen en de zender gaat piepen?
Ik heb helemaal geen telemetrie geinstalleerd.
Volgens mij staat er dan ook in je display de vraag of de HF aan of uit moet; als je ingeeft Uit, dan houdt de piep op. Is dat niet zo?
PH_AJH
Forum veteraan
Dan heb je de ontvanger al wel een keer aan de zender gebonden maar niet aan het model. De zender denkt dan dat je probeert met het verkeerde modelgeheugen te gaan vliegen en laat dat door het piepen horen.
Je moet dus de zender inderdaad UITschakelen (nou ja, niet de zender maar het HF) en de ontvanger opnieuw binden.
Je moet dus de zender inderdaad UITschakelen (nou ja, niet de zender maar het HF) en de ontvanger opnieuw binden.
Instelling gas op MX-16
Ik merk dat op al mijn vleugelmodellen bij half gas de brushlessmotor al praktisch voluit draait. Mode 2.
Heb geen idee hoe ik dat moet veranderen.De ESC is volgens handleiding geprogrammeerd.
Gr. Bernard
Ik merk dat op al mijn vleugelmodellen bij half gas de brushlessmotor al praktisch voluit draait. Mode 2.
Heb geen idee hoe ik dat moet veranderen.De ESC is volgens handleiding geprogrammeerd.
Gr. Bernard