@Lyckele, dit werkt helaas wel wat vertragend op de Zone V2..... Daar ligt de eerste kern van klaar, voorzien van glasrandjes klaar om te baggen. Nu nog een raamwerkje om disser op te maken. Hoe ik de disser vastzet voor het epoxien heeft deels te maken met hoe het me bevalt om het glas al op de geverfde mylars vast te zetten met spuitlijm. Ook wil ik ervaren hoe een neuslijstje van 2 laagjes 54grams glas aanvoelt. Dat heb ik nu op het nieuw te baggen rudder van de Supra II zitten. Mijn nieuwe rompmal voor de fullsize DLG staat nu in het glas. Overschot aan hars van het baggen smeer ik daar op weg. Zo heeft het een met het ander te maken. Straks is er in een keer een heleboel af.
---------------------------------------------------------------------------------------------------------------------------------------
Het is de bedoeling de bouw van Supra II uit te voeren met opgedane ervaringen van Supra I. En ook om weer nieuwe dingen te proberen.
Belangrijkste thema in de bouw van Supra II zal zijn om het rekenblad van Prop-er te gebruiken om de huid van de vleugel te berekenen. Dit is voor mij van belang voor een toekomstig groot project.
Verder wil zoveel mogelijk restmaterialen gebruiken. Zo is het stabilo gesneden uit een twee blokken schuim per helft. Het kielvlak is opgebouwd uit drie blokken schuim. Een deelnaad is nog te zien op de foto. De blokken snijd ik met hete draad op maat en bewerk de staande kanten dan met schuurpapier na tot dat ze strak tegen elkaar passen. Dan lijm ik de blokken aan elkaar. Alleen een rupsje lijm aan de onderzijde, zodat er geen lijm in het deel zit waar de vleugelkern uitgesneden wordt. Hiervoor gebruik ik deze lijm:
Ook ga ik niet al te zeikerig op het gewicht letten. De zwarte romp met nosecone weegt 120gram. Dankzij mee gesopte stukjes afval kevlar voelt de romp lekker stevig aan.
Het stabilo heeft een zwaardere versteviging om de leading edge mee gekregen dan nodig, maar ja, een strook glas/60grams kevlar had ik nog liggen.... Normaal zou ik glas en 36grams kevlar gebruiken.
Een wipje voor het stabilo heb ik ook al. Deze is 1.5 keer zwaarder dan nodig. Hij ligt toch alleen maar stof te vangen, ook zonde, dus maar gebruiken....
Voor hoogte en richtingsroer zijn er twee HS-81 servo's uit de lade opgeduikeld.
In de vleugel gaan vier MPX vleugelservo's. Deze:
Ik weet nog niet of er RDS in gemaakt gaat worden of niet. Tevens mis ik, volgens mij, hoorntjes die op deze MPX servo's passen. Even ogen en oren open houden de komende tijd want RDS of geen RDS, die dingen heb je wel nodig.
Nu, een ontvanger heb ik ook nog. Accu zal ook wel lukken.
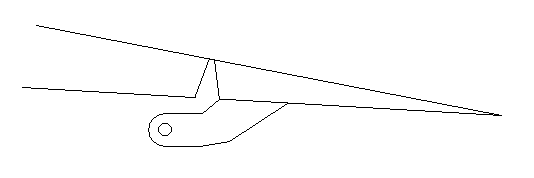
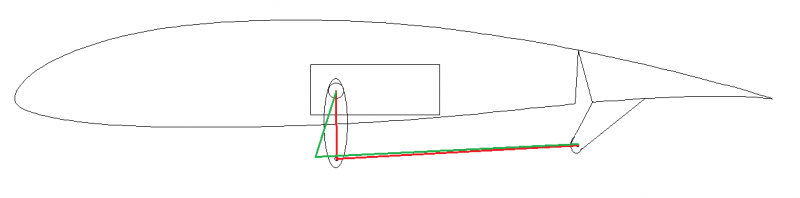
Mis alleen Ø2mm carbon staaf met voldoende lengte om hoogte en richting aan te sturen. Ook een starthaak heb ik niet meer liggen.
Iemand een idee voor een verstelbare zelfbouw starthaak? Dan wordt het helemaal een low budget actie!


")
 ).
).") ).
).




