Van mijn kant dan ook een bijdrage over de El Nino.
Ik heb hem al zowat twee maanden (het is produktienummer 1) maar heb weinig tijd gehad om eraan te werken. Heb ook geen haast, want ermee vliegen is hier voorlopig nog niet mogelijk. De mijne is ook al oranje.
Ik ben begonnen met het monteren van de Tenshock Viper 14T 4400 kV met ME 5:1, dit is bij ons hier inmiddels de standaard-aandrijving voor lichte modellen en gelijk aan de combinatie die Alex in het prototype heeft.
Het bleek nodig om een spantje (van 1,5 mm GFK of pertinax) tussen ME en kopspant te zetten, enerzijds omdat de (heel dunne) kopspant aan de binnenzijde niet helemaal vlak is (de aandrijving zou bij mij naar links wijzen), maar vooral omdat de lagerflens van de ME zonder spant te ver door de kopspant zou steken waardoor de 28mm RFM spinner niet helemaal aansluit. Ik heb het spantje met een beetje kontaktlijm op de ME geplakt, 15 minuten epoxy erop, de combinatie in de romp geschoven en de spinner strak tegen de kopspant aangeduwd, vastgeschroefd en zo uitgericht gehouden tot de lijm gedroogd was.
Na 15 minuten de combinatie naar binnen gedrukt.
Misschien een idee voor Alex om zo´n spantje mee te leveren.
Vervolgens heb ik de ballastbuis ingebouwd. Voor de ballast heb ik 15mm rond loodstaf gebruikt dat ik in broodjes van 2cm lengte (ca 40 gram per stuk) heb gezaagd en verbonden met een stuk gaskabel. Daartoe met de flex een sleufje in de broodjes gemaakt en vervolgens de gaskabel met een beetje endfest en een klap met de hamer (alleen in het midden, want de „sliert“ moet kunnen buigen) vastgezet. Aan de voorzijde een stukje messingstrip op gelijke wijze ingepast waarmee dan de ballast op de servoplaat wordt vastgezet. De servoplaat heb ik verdubbeld aan de zijden om wat meer lijmoppervlak te krijgen.
De eerste sliert is 8 broodjes lang en weegt 310 gram. Later maak ik nog slierten van 3 en 5 broodjes.
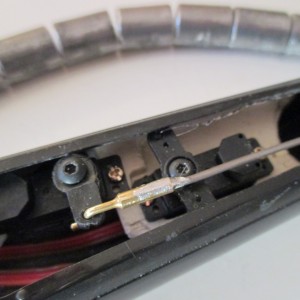
In de tussentijd lang nagedacht over de aansturing van de roeren. Met spring/pull, waarvoor Jeroen Kole heeft gekozen, heb ik geen ervaring. Uiteindelijk besloten om het richtingroer pull/pull aan te sturen en het hoogteroer met de originele stang. Daartoe moest dan wel de L/R servo in het midden van de romp komen, en de H/L servo noodgedwongen daarvoor. Gemonteerd aan de zijwand opdat de ontvanger er nog naast kan. Ietwat onconventioneel, maar het zal wel functioneren zo.
Achterliggende gedachte van de andere aansturing is een gewichtsbesparing van de stang van 10 gram, waarmee aan de voorzijde het gewichtsverschil tussen een 500 en een 800 accu al voor de helft is „terugverdiend“. Ik ben van plan alleen 500 Bolts te gaan gebruiken omdat deze een stuk gemakkelijker uit te wisselen zijn. Eventueel breng ik helemaal vooraan in de romp wat lood aan.
Nu beginnen aan de vleugel. Daarover dan later meer.
")



 en al helmaal niet met deze top "licht"gewicht kist.
en al helmaal niet met deze top "licht"gewicht kist.