Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Multiwii Tricopter (voorheen Zelfbouw goedkope en eenvoudige Tricopter)
- Topicstarter streetbiker1977
- Startdatum
Wii Nunchuck tegenslag
Ai, kleine tegenslag met de Wii Nunchuck.
Ik vond het al raar dat de Wii Nunchuck nog niet was toegekomen.
Daarom heb ik vandaag nog eens de verkoopsgegevens bekeken.
De aankoop dateert van 14/11, de dag erop kreeg ik een mail via eBay dat de verkoper de nunchuck had verstuurd.
Helaas zie ik nu dat de verkoper geen geregistreerde verkoper meer is.
De beoordelingen lopen slechts tot 19/11.
Dat betekent meestal dat er hommeles is...nweer:
Vlug even een emailtje gestuurd naar de verkoper. Maar ik denk niet dat ik de nunchuck nog ga zien.
Nog even wachten en dan een claim indienen voor een refund.
Ondertussen heb ik wel al een andere nunchuck gekocht via een verkoper in de UK.
En nu maar duimen dat die wel aankomt... (en liefst zo snel mogelijk!!!!)
Ai, kleine tegenslag met de Wii Nunchuck.
Ik vond het al raar dat de Wii Nunchuck nog niet was toegekomen.
Daarom heb ik vandaag nog eens de verkoopsgegevens bekeken.
De aankoop dateert van 14/11, de dag erop kreeg ik een mail via eBay dat de verkoper de nunchuck had verstuurd.
Helaas zie ik nu dat de verkoper geen geregistreerde verkoper meer is.
De beoordelingen lopen slechts tot 19/11.
Dat betekent meestal dat er hommeles is...
nweer:Vlug even een emailtje gestuurd naar de verkoper. Maar ik denk niet dat ik de nunchuck nog ga zien.
Nog even wachten en dan een claim indienen voor een refund.
Ondertussen heb ik wel al een andere nunchuck gekocht via een verkoper in de UK.
En nu maar duimen dat die wel aankomt... (en liefst zo snel mogelijk!!!!)
Goed nieuws: ik ben dan toch niet geripped op eBay! 
Vandaag is de nunchuck toegekomen, ziet er goed uit.
Als ik nog heel even de tijd vind om verder te werken, dan zit alles vlug in elkaar.
Vandaag is de nunchuck toegekomen, ziet er goed uit.
Als ik nog heel even de tijd vind om verder te werken, dan zit alles vlug in elkaar.
Laatst bewerkt:
Gewoon zonder Nunchuk vliegen? Ik zou het je persoonlijk aanraden, als je tevreden bent met de setup, dan de NK erbij solderen...
Mijn Tricopter is heel stabiel zonder Nunchuk.
(Just my 2 cents)
Groeten en succes.
Ik heb je posts gezien op RcGroups.
Bedankt voor de tip i.v.m. de nunchuck, ik ga eerst proberen te vliegen met enkel de WM+, daarna de nunchuck even proberen.
Vandaag heb ik de Arduino + WMP + Nunchuck kunnen testen met de GUI. En alles reageert zoals het moet, ik heb dus geen kapotte onderdelen. 
Nu moet ik nog enkel de printplaat afwerken en er kan worden gevlogen!!
Binnenkort meer.
Nu moet ik nog enkel de printplaat afwerken en er kan worden gevlogen!!
Binnenkort meer.
Laatst bewerkt:
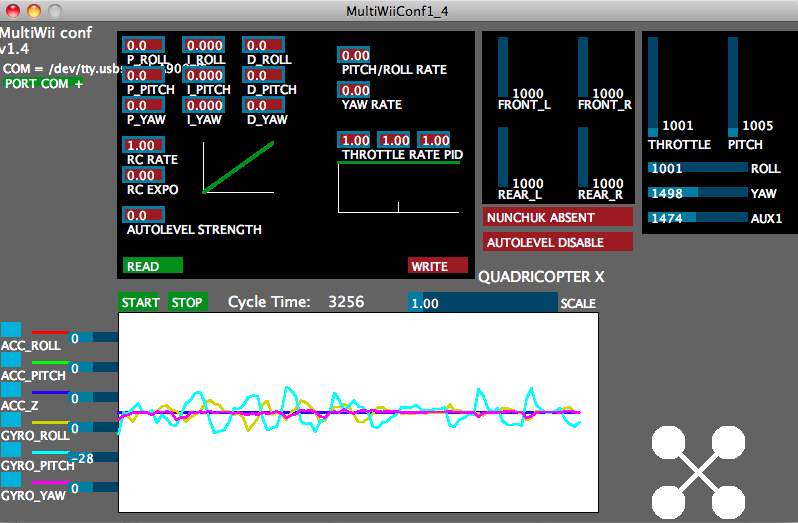
streetbiker1977; Ik heb net een proefsetup gebouwd met een Arduino nano en een WMP.
App werkt en GUI doet het ook. Ik zie de lijntjes ook bewegen als ik de WMP draai enzo, maar de motorlevels en het plaatje rechts onder reageren niet.
Is dat normaal als je alleen een WMP aangesloten hebt ? Of komt het omdat ik nog geen receiver aangesloten heb ?
http://www.modelbouwforum.nl/forums/members/martkrui-albums-multiwiicopter-picture52340-proefopstelling-arduino-nano.jpg
App werkt en GUI doet het ook. Ik zie de lijntjes ook bewegen als ik de WMP draai enzo, maar de motorlevels en het plaatje rechts onder reageren niet.
Is dat normaal als je alleen een WMP aangesloten hebt ? Of komt het omdat ik nog geen receiver aangesloten heb ?
http://www.modelbouwforum.nl/forums/members/martkrui-albums-multiwiicopter-picture52340-proefopstelling-arduino-nano.jpg
Laatst bewerkt door een moderator:
Waarom heb je een Arduino Pro gekocht en niet een Nano. De nano vind een stuk handiger omdat ik dan geen losse usb/serieel nodig heb. Eventueel kun je de stekker verlengen naar een bus op een handigere plaats. Als je dan toch een losse usb/serieel hebt, waarom kijk je niet naar een Paperduino. Die kun je zelfs erg klein op een een gatenkaasje bouwen (ik heb aan de hand van een Paperduino een eigen versie van de Arduino gemaakt (wel ge-etst) welke in een backplate gestoken kan worden voor mijn modelschepen). Binnenkort maar weer eens verder met mijn eigen tri-copter.
Danny
Danny
Thanks... dan weet ik dat het allemaal goed werkt... ontvanger zal ik binnenkort eens aansluiten.. Nunchuk is nog onderweg.Als je alleen een wmp aan gesloten hebt dan zie je rechts onderin niets bewegen sluit je de Nunchuk ook aan wel en als je de motorlevels wil zien bewegen moet je je ontvanger ook aan sluiten.
Leuk om te zien dat zoveel mensen met een multiwiiproject bezig zijn, toppie!
Ik ben helemaal nog geen expert, ik lees elke dag om zoveel mogelijk bij te leren.
De arduino pro mini lag voor de hand omdat de meeste setups zo zijn en zo getest worden. Eenmaal de arduino pro mini werkt kan ik uitkijken naar alternatieven, die zijn idd aanwezig.
Blijkbaar moet ik mijn WMP calibreren, da's nog niet gebeurd.
Ik ben helemaal nog geen expert, ik lees elke dag om zoveel mogelijk bij te leren.
De arduino pro mini lag voor de hand omdat de meeste setups zo zijn en zo getest worden. Eenmaal de arduino pro mini werkt kan ik uitkijken naar alternatieven, die zijn idd aanwezig.
Blijkbaar moet ik mijn WMP calibreren, da's nog niet gebeurd.
Laatst bewerkt:
Ondertussen is alles gesoldeerd en gemonteerd.
In de arduino zit de definitieve versie 1.5 geprogrammeerd met standaard settings (PID, etc.).
Alle basis controls werken zoals het moet: pitch, roll, throttle, yaw, motors starten/stoppen; het werkt allemaal.
De ESC's werden gecalibreerd, alsook de WM+ en nunchuck.
En ook alle waarden in de GUI zijn wat ze moeten zijn.
Alleen...
Na een poging tot hooveren bleek dat er iets niet klopt.
De wiicopter reageert heel nerveus en is erg onstabiel. Er valt gewoon niet mee te vliegen.
Rest mij alleen nog eens alles te overlopen en te dubbelchecken.
Misschien is er teveel vibratie in de armen of is er toch nog een calibratie niet correct verlopen.
Op RcGroups krijg ik voorlopig weinig interessante reacties op de problemen die ik ervaar.
Wordt vervolgd...
In de arduino zit de definitieve versie 1.5 geprogrammeerd met standaard settings (PID, etc.).
Alle basis controls werken zoals het moet: pitch, roll, throttle, yaw, motors starten/stoppen; het werkt allemaal.
De ESC's werden gecalibreerd, alsook de WM+ en nunchuck.
En ook alle waarden in de GUI zijn wat ze moeten zijn.
Alleen...
Na een poging tot hooveren bleek dat er iets niet klopt.
De wiicopter reageert heel nerveus en is erg onstabiel. Er valt gewoon niet mee te vliegen.
Rest mij alleen nog eens alles te overlopen en te dubbelchecken.
Misschien is er teveel vibratie in de armen of is er toch nog een calibratie niet correct verlopen.
Op RcGroups krijg ik voorlopig weinig interessante reacties op de problemen die ik ervaar.
Wordt vervolgd...
Update:
De triwiicopter vliegt!
Ik heb de basic settings een stuk lager gezet (lees: minder gevoelig).
De GWS 1047 props heb ik vervangen door de kleinere GWS 9047 props, die maken iets minder wind en zijn minder gevoelig.
De ESC's heb ik voor het zekerste ook nog maar even calibreerd.
En jawel hoor, de tri vliegt nu wel stabiel. Dit in beide modes, met en zonder nunchuck.
Mijn concusies zijn voornamelijk:
1. de basic Arduino settings waren te gevoelig.
2. de GWS 1047 props maken veel wind en veroorzaken heel wat reacties van de gyro's als je laag boven de grond hoovert. Vanaf je 1,5 meter boven de grond vliegt, wordt hij heel stabiel.
Het enige waar je mee moet opletten is expo. Je hebt veel expo nodig om de triwiicopter soepel onder controle te houden.
In de GUI had ik RC Expo op 0.70 staan, dit zal ik nog moeten verlagen om meer expo te krijgen. Zelfs met 0.70 expo kun je stuntvliegen, zo gevoelig was de stick op 1/4 en 3/4 uitslag.
Er zit ook nog een kleine drift in de tri.
Maar dit komt waarschijnlijk door de tijdelijke bevestiging van WM+ en nunchuck (waardoor ze nog lichtjes kunnen bewegen en iets scheef kunnen komen te zitten) en door het ontbreken van een hercalibratie van WM+ en nunchuck na montage.
Voor het eerst heb ik het gevoel dat het wel helemaal in orde komt met de triwiicopter!
De triwiicopter vliegt!
Ik heb de basic settings een stuk lager gezet (lees: minder gevoelig).
De GWS 1047 props heb ik vervangen door de kleinere GWS 9047 props, die maken iets minder wind en zijn minder gevoelig.
De ESC's heb ik voor het zekerste ook nog maar even calibreerd.
En jawel hoor, de tri vliegt nu wel stabiel. Dit in beide modes, met en zonder nunchuck.
Mijn concusies zijn voornamelijk:
1. de basic Arduino settings waren te gevoelig.
2. de GWS 1047 props maken veel wind en veroorzaken heel wat reacties van de gyro's als je laag boven de grond hoovert. Vanaf je 1,5 meter boven de grond vliegt, wordt hij heel stabiel.
Het enige waar je mee moet opletten is expo. Je hebt veel expo nodig om de triwiicopter soepel onder controle te houden.
In de GUI had ik RC Expo op 0.70 staan, dit zal ik nog moeten verlagen om meer expo te krijgen. Zelfs met 0.70 expo kun je stuntvliegen, zo gevoelig was de stick op 1/4 en 3/4 uitslag.
Er zit ook nog een kleine drift in de tri.
Maar dit komt waarschijnlijk door de tijdelijke bevestiging van WM+ en nunchuck (waardoor ze nog lichtjes kunnen bewegen en iets scheef kunnen komen te zitten) en door het ontbreken van een hercalibratie van WM+ en nunchuck na montage.
Voor het eerst heb ik het gevoel dat het wel helemaal in orde komt met de triwiicopter!
E
EDFF
Guest
Hi, goed te zien dat we in Nederland ook bezig zijn met tricopters.
Ook ik volg de ontwikkelingen al een tijdje en ga ook van start met de bouw van een TriWiicopter, maar dan op basis van de BaronPilot.
Ik heb geen ervaring met RC-vliegen maar denk dat ik toch ver moet kunnen komen met alle threads die er zijn. Dus misschien ga ik nog wat vragen stellen") .
.
De ontbrekende onderdelen heb ik van het weekeinde besteld en komend weekeinde begin ik met de bouw van het frame.
Mijn eerste twee vragen zijn:
1) heeft iemand ervaring met hoge motorsnelheden? Ik heb namelijk een paar 1534KV motoren en ik wilde deze gaan gebruiken met 2x 8x6 props en 1x 8,5x6 pushprop. Maar in sommige threads lees ik dat je onder de 1000KV moet proberen te blijven.
2) de YAW servo dit ik wil gaan gebruiken heeft een uitslag van 60 graden. Is dat niet heel veel en moet ik dit terugbrengen of juist prima.
Ed.
Ook ik volg de ontwikkelingen al een tijdje en ga ook van start met de bouw van een TriWiicopter, maar dan op basis van de BaronPilot.
Ik heb geen ervaring met RC-vliegen maar denk dat ik toch ver moet kunnen komen met alle threads die er zijn. Dus misschien ga ik nog wat vragen stellen
.De ontbrekende onderdelen heb ik van het weekeinde besteld en komend weekeinde begin ik met de bouw van het frame.
Mijn eerste twee vragen zijn:
1) heeft iemand ervaring met hoge motorsnelheden? Ik heb namelijk een paar 1534KV motoren en ik wilde deze gaan gebruiken met 2x 8x6 props en 1x 8,5x6 pushprop. Maar in sommige threads lees ik dat je onder de 1000KV moet proberen te blijven.
2) de YAW servo dit ik wil gaan gebruiken heeft een uitslag van 60 graden. Is dat niet heel veel en moet ik dit terugbrengen of juist prima.
Ed.
Laatst bewerkt door een moderator:
Ik zelf gebruik 1200kv motoren met 8x4.5 props. Dit werkt goed, het vlieg gedrag krijg je alleen niet zo rustig als met de lagere kv motoren omdat je trekkracht mist. Dit heb je vooral nodig als je naar beneden gaat. Als je motoren te weinig trekkracht hebben zal je quadcopter gaan schommelen.
E
EDFF
Guest
Nog een vraagje: ik lees ook dat sommigen geen pushprop gebruiken maar de tailmotor wat schuin hebben geplaatst. Ervaringen?
En is nooit perfect...Dat kan, maar ik dacht dat dan alle motoren 4 graden tegen hun koppel in geplaatst moeten worden, kost uiteraard wel wat rendement.
Bij een + configuratie gaat het wel, je moet dan de voorste en de achterste motor onder een hoek van ik meen 8 graden zetten, beide natuurlijk tegenovergesteld van elkaar.
Iemand op rcgroups heeft het getest en merkte geen verschil tussen de motor onder een hoek zetten, of het gebruiken van push props.
Groeten remie
Iemand op rcgroups heeft het getest en merkte geen verschil tussen de motor onder een hoek zetten, of het gebruiken van push props.
Groeten remie
E
EDFF
Guest
Nog even terugkomend op mijn tweede vraag: welke maximale hoek moet de YAW servo kunnen innemen voor probleemloze vluchten?